復(fù)雜路況下智能小車的設(shè)計(jì)

作者 / 傅海軍 段少飛 李炫君 江蘇大學(xué)電氣信息工程學(xué)院(江蘇 鎮(zhèn)江)
本文引用地址:http://www.104case.com/article/201809/392389.htm江蘇大學(xué)高等教育教改研究立項(xiàng)課題 (2017JGYB045) ;江蘇大學(xué)大學(xué)生科研立項(xiàng)資助項(xiàng)目(15B114)
摘要:本文研究復(fù)雜路況下多功能智能小車的設(shè)計(jì),硬件設(shè)計(jì)以STC 89C52RC為核心,通過HC-06藍(lán)牙模塊實(shí)現(xiàn)與Android手機(jī)通訊并實(shí)現(xiàn)遠(yuǎn)程操控,并利用1602液晶顯示模塊來實(shí)現(xiàn)交互。小車驅(qū)動方面采用了L298N為驅(qū)動模塊,另采用ST188紅外光電傳感器以實(shí)現(xiàn)小車自動尋路功能。本項(xiàng)目使用的控制軟件是通過MIT APP Inventor平臺設(shè)計(jì)的。
1 引言
智能小車作為智能機(jī)器人的雛形,它通過內(nèi)外傳感器感知外部環(huán)境信息和自身狀態(tài),完成相應(yīng)動作。是一個在復(fù)雜環(huán)境中實(shí)現(xiàn)自主作業(yè)的自動控制系統(tǒng),屬于陸地自主行駛車輛的一種。它涉及到單片機(jī)、傳感器、信息融合、通信接口、導(dǎo)航控制、人工智能以及自動控制等一系列高新技術(shù)。研究適應(yīng)復(fù)雜環(huán)境的智能車對我國科技的發(fā)展具有重要意義,機(jī)器對環(huán)境的耐受能力是高于人類的,在諸如火災(zāi)、地震等災(zāi)害后的現(xiàn)場搜救中,這類機(jī)器能發(fā)揮出很大作用。目前國內(nèi)外都有類似功能的機(jī)器人,但功能還不夠完善且由于行走系統(tǒng)不完善,不能適應(yīng)復(fù)雜環(huán)境。還有未知地區(qū)的探索,如礦洞、極地等,甚至外星探索用的考察車也屬于智能小車的研究范圍。本設(shè)計(jì)以51單片機(jī)為核心,可以實(shí)現(xiàn)自動避障、遠(yuǎn)程藍(lán)牙操控等功能,以應(yīng)對可能出現(xiàn)的復(fù)雜環(huán)境。另外本設(shè)計(jì)在開發(fā)時(shí)就預(yù)留了其他功能接口,可以方便的實(shí)現(xiàn)改裝升級,例如加入視頻監(jiān)控模塊、尋跡模塊等,都很方便。
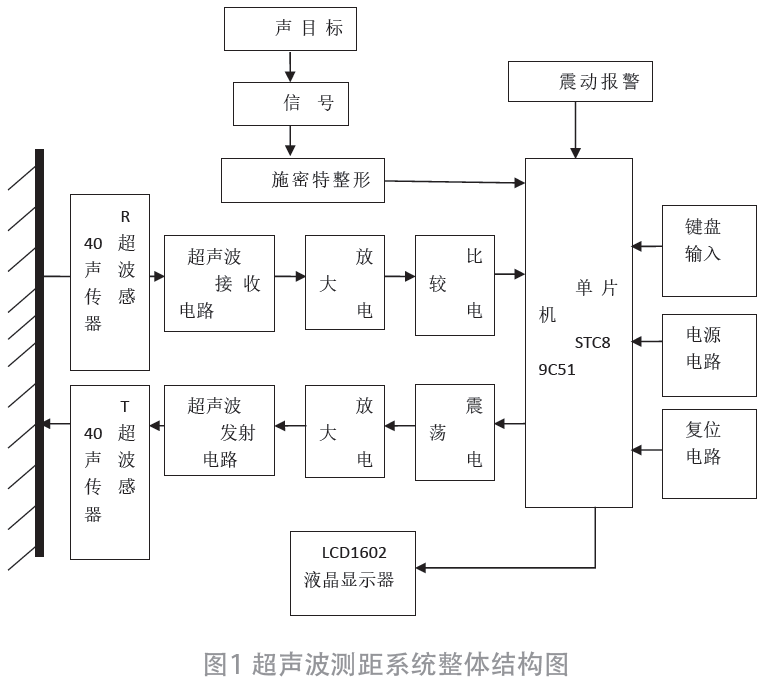
2 系統(tǒng)總體設(shè)計(jì)
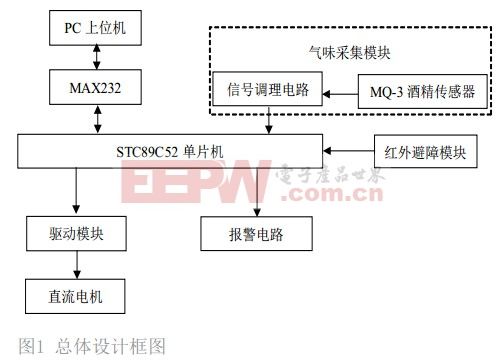
系統(tǒng)的功能主要依靠四個模塊來完成,分別為藍(lán)牙通訊模塊,1602液晶顯示模塊,直流減速電機(jī)驅(qū)動模塊,自動避障模塊。設(shè)計(jì)以Android手機(jī)為控制平臺,通過HC-06藍(lán)牙接收模塊與手機(jī)端藍(lán)牙連接配對,實(shí)現(xiàn)手機(jī)與51單片機(jī)的通訊并通過命令來控制小車行動。一般情況下小車能夠自動探索。L298N電機(jī)驅(qū)動模塊同時(shí)驅(qū)動兩個電機(jī),通過單片機(jī)控制兩個電機(jī)分別正、反轉(zhuǎn)來實(shí)現(xiàn)智能小車前進(jìn)、后退、左右轉(zhuǎn)向及掉頭,每一步命令開始或動作結(jié)束,都會在1602液晶顯示模塊和手機(jī)端顯示出來,易于控制。系統(tǒng)采用7.2 V電池供電,此電源可直接給L298N供電,51單片機(jī)的供電電源采用L298電機(jī)驅(qū)動模塊上自帶的5 V電源輸出,這二者正常工作需要共地。系統(tǒng)總框圖如圖1所示。
雜路況-1.jpg")
3 系統(tǒng)硬件
系統(tǒng)主要硬件包括:STC89C52最小系統(tǒng)、HC-06藍(lán)牙模塊、LCD1602液晶顯示模塊、 電機(jī)驅(qū)動模塊等,另外本設(shè)計(jì)采用手機(jī)來實(shí)現(xiàn)遠(yuǎn)程控制。硬件原理圖如圖2所示。
雜路況-2.jpg")
3.1 主控系統(tǒng)選擇
本系統(tǒng)采用STC89C52RC作為核心,這是STC公司生產(chǎn)的一種低功耗、高性能的8位CMOS微控制器,具有 8K 在系統(tǒng)可編程Flash存儲器,512字節(jié)RAM,是一款十分經(jīng)典的單片機(jī),本設(shè)計(jì)采用這款單片機(jī)的原因是其性能足夠支持智能小車完成各種復(fù)雜動作,且相關(guān)資料十分豐富,結(jié)構(gòu)簡單,適合研究設(shè)計(jì)。
3.2 HC-06藍(lán)牙模塊
本設(shè)計(jì)采用HC-06藍(lán)牙模塊作為智能小車與手機(jī)端通信的橋梁,選中原因是其應(yīng)用廣泛且價(jià)格低廉,在淘寶上就能購買,方便控制成本。為了實(shí)現(xiàn)HC-06模塊與手機(jī)的正常連接,設(shè)計(jì)中使用了MIT APP Inventor平臺編寫了手機(jī)端軟件,實(shí)際效果與“聊天”類似。使用過程中,手機(jī)作為客戶端,HC-06藍(lán)牙模塊作為服務(wù)器,實(shí)現(xiàn)手機(jī)操控單片機(jī)的效果。控制軟件界面如圖3所示。
雜路況-3.jpg")
3.3 L298N電機(jī)驅(qū)動模塊
本設(shè)計(jì)選用L298N作為電機(jī)驅(qū)動模塊,其特點(diǎn)是工作穩(wěn)定,可實(shí)現(xiàn)電機(jī)正反轉(zhuǎn)及調(diào)速,啟動性能好,啟動轉(zhuǎn)矩大。其工作電壓可達(dá)到36 V,4 A電流,可同時(shí)驅(qū)動兩臺直流電機(jī),很適合用于機(jī)器人及智能小車的設(shè)計(jì)。
智能小車的電機(jī)使用直流減速電機(jī),這是設(shè)計(jì)智能小車最常用的電機(jī)。這種電機(jī)是在普通電機(jī)的基礎(chǔ)上加上減速齒輪組,降低電機(jī)轉(zhuǎn)速的同時(shí)提升扭力,使其可以帶動大質(zhì)量物體運(yùn)動,舍棄部分速度換取良好的克服復(fù)雜地形的能力。
3.4 LCD1602液晶顯示模塊
本設(shè)計(jì)采用1602液晶顯示模塊來顯示操作參數(shù),方便用戶的人機(jī)交互。1602液晶顯示模塊每一屏可以顯示兩路16位字符,不能顯示中文,可以作為簡單觀測窗口觀測小車狀態(tài)。本次采用十六腳的LCD1602,其數(shù)據(jù)命令接口連接單片機(jī)P0口,V0為液晶顯示器對比度調(diào)整端,接正電源時(shí)對比度最弱,接地電源時(shí)對比度最高,15腳背光正極,16腳背光負(fù)極,使用中可以根據(jù)實(shí)際效果調(diào)整。
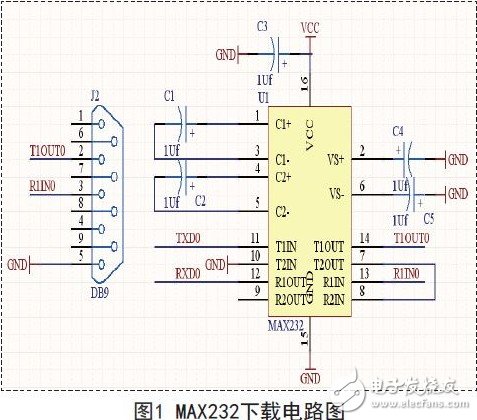
3.5 自動避障模塊
設(shè)計(jì)自動避障模塊采用了ST188紅外光電傳感器,其一般電路如圖4,本設(shè)計(jì)中R1=510 Ω,R2=20kΩ,E為輸出端。
雜路況-4.jpg")
為方便控制小車,設(shè)計(jì)中使用了4組ST188光電傳感器l1、l2、r1、r2,其輸出端分別對應(yīng)單片機(jī)P3^2、P3^3、P3^6、P3^7口,共有16種不同的狀態(tài),可以劃分為前行(0000)、左轉(zhuǎn)90°(0010、0011)、右轉(zhuǎn)90°(0100、1100)、左轉(zhuǎn)45°(0001、1001)、右轉(zhuǎn)45°(1000)、掉頭(1011、1101、1111)、后退左轉(zhuǎn)90°(0101、0110、0111)、后退右轉(zhuǎn)90°(1010、1110)共8種轉(zhuǎn)向方案,更貼近實(shí)際情況。
4 軟件設(shè)計(jì)
軟件系統(tǒng)流程圖如圖5所示。接上電源后, 程序開始初始化設(shè)置, 藍(lán)牙一直在檢測是否收到指令, 如果接收到了指令,則會根據(jù)接收的指令執(zhí)行,否則會一直在循環(huán)檢測。當(dāng)進(jìn)入了自動探索模式后, 藍(lán)牙模塊停止工作,小車根據(jù)紅外傳感器的返回?cái)?shù)據(jù)行動。
雜路況-5.jpg")
5 實(shí)驗(yàn)成果分析
小車在實(shí)際檢測過程中基本實(shí)現(xiàn)了設(shè)計(jì)功能,在自動避障模式下,智能小車能靈活地實(shí)現(xiàn)避障效果。在藍(lán)牙模式下,小車也能正常的按照指令前進(jìn)、后退和轉(zhuǎn)向,基本實(shí)現(xiàn)了預(yù)期功能,小車實(shí)物圖如圖6。在系統(tǒng)運(yùn)行過程中,由于L298N同時(shí)控制兩個存在一定差異的電機(jī),造成小車連續(xù)直行時(shí)會有微小的偏角,加裝光電測速器可以解決此問題,但由于小車本身行進(jìn)速度不快,對于前進(jìn)方向的要求也并不高,所以并不影響小車性能。另外由于電路設(shè)計(jì)存在缺陷,在藍(lán)牙模塊工作時(shí),1602液晶顯示模塊會出現(xiàn)輕微的閃屏現(xiàn)象,這是由于電壓不穩(wěn)定引起的。
雜路況-6.jpg")
6 總結(jié)
本文介紹了一種利用移動端直接控制智能小車的思路。本項(xiàng)目是中國各種電子競賽的熱門項(xiàng)目,網(wǎng)絡(luò)上有很多資料,我們選題時(shí)就考慮過這個問題。本項(xiàng)目屬于那種研究的人很多,但怎么研究都不會過時(shí)的項(xiàng)目,同時(shí),由于有較多的網(wǎng)上資料及學(xué)院研究相關(guān)項(xiàng)目的人的幫助,智能小車項(xiàng)目也不至于難到我們無處下手的地步,這是一個很適合我們的項(xiàng)目。在這次的項(xiàng)目實(shí)戰(zhàn)中,涉及到很多平時(shí)為人們忽視的東西,例如將自動避障的紅外探頭朝向地面,再修改部分程序,就能實(shí)現(xiàn)尋跡功能,很多東西都是互通的。此次設(shè)計(jì)中,單片機(jī)的P3口并沒有被充分利用,這說明本設(shè)計(jì)的小車仍具有較大的改進(jìn)空間。另外小車原本的設(shè)計(jì)是有視頻錄像模塊的,但考慮到成本及電路優(yōu)化的問題,并沒有將其加入最終成品中,但這也是一個不錯的設(shè)計(jì)思路,希望未來有更好的設(shè)計(jì)思路和方案。
參考文獻(xiàn):
[1]李曉林,牛昱光, 閻高偉. 單片機(jī)原理與接口技術(shù)(第2版)[M]. 北京: 電子工業(yè)出版社, 2011
[2]喬維德. 改進(jìn)粒子群優(yōu)化神經(jīng)網(wǎng)絡(luò)的高壓斷路器故障診斷[J]. 常熟理工學(xué)院學(xué)報(bào), 2016,30(2):47-50
[3]楊桂林. 基于 AT89S51 的智能小車的設(shè)計(jì)[ J].單片機(jī)開發(fā)與應(yīng)用, 2010(26):124-125.
[4] 孟祥武, 胡勛, 王立才, 等. 移動推薦系統(tǒng)及其應(yīng)用[J] . 軟件學(xué)報(bào),2013, 24 ( 1 ): 91-100
[5] 吳建平, 成 毅.“工程對象教學(xué)法” 模式應(yīng)用研究[J]. 成都理工大學(xué)學(xué)報(bào)(社會科學(xué)版), 2009, 17(4):85- 88
[6] 宋 錦. 單片機(jī)課程項(xiàng)目教學(xué)法的探索和實(shí)踐[J]. 武漢職業(yè)技術(shù)學(xué)院學(xué)報(bào), 2006, 5(6):90-120
[7] 劉 春 陽, 賈 興 建. 基 于 labbview 的pc機(jī) 與 單 片 機(jī) 的 串 行 通 信研 究[J]. 電 源 技 木 期 刊,2008,14(1):15-18
[8] 黃仁祥, 金琦, 易偉. 人人都能開發(fā)安卓APP--APPinventor2 應(yīng)用開發(fā)實(shí)戰(zhàn). 機(jī)械工業(yè)出版社, 2015.
[9] 姚培, 張李堅(jiān), 周晶香. 基于單片機(jī)控制的智能尋跡避障小車[J] . 機(jī)電信息, 2010(12):154-193.
本文來源于《電子產(chǎn)品世界》2018年第10期第36頁,歡迎您寫論文時(shí)引用,并注明出處。





評論