DSP+FPGA在高速高精運動控制器中的應用

1.5 存儲模塊
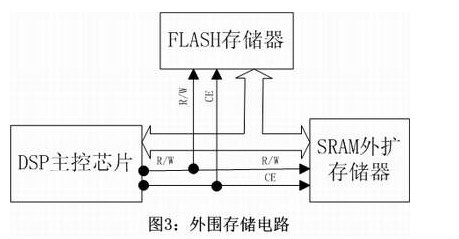
本文引用地址:http://www.104case.com/article/83798.htm存儲模塊用于存儲系統程序和數據,主要由SRAM(2片CY7C1021)和FLASH(AM29F400B)組成。外圍存儲電路如圖3所示。
2 軟件設計
該運動控制卡應用時插在工控機的ISA槽上,與上位機配合工作。首先在上位NC機輸入加工曲線,由上位機做粗插補,然后把數據通過ISA接口傳遞給控制卡。控制卡對接收到的數據再做細插補——采用三次B樣條插值,然后發送給DA,驅動電機運動。DSP通過FPGA進行脈沖計數,讀出直線電機光柵尺的反饋信息,然后采用離散PID控制算法調整,以便于電機運動控制的最優化。
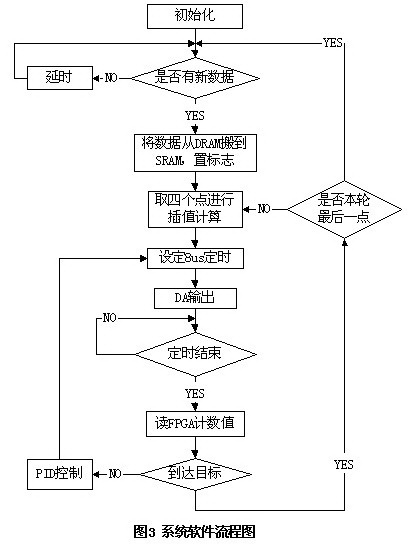
運動控制算法的核心是先用B樣條插值法把目標點進一步細化,使運動曲線更平滑,然后在運動過程中采用PID算法進行調整,最終達到高速高精的設計要求,圖3給出了系統軟件流程圖。
2.1 B樣條插值
目前許多先進的CAD/CAM系統都采用了B樣條曲線。其特點是,可用統一的數學形式精確表示分析曲線(如直線,圓錐曲線等)和自由曲線(如均勻B樣條曲線等),因而便于用統一的數據庫管理、存儲,程序量可以大大減少;非均勻B樣條曲線定義中的權因子使外形設計更加靈活方便,設計人員通過調整具有直觀幾何意義的點、線、面元素即可達到預期的效果。
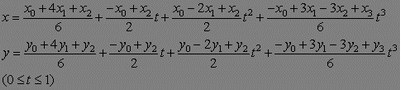
本系統采用三次B樣條曲線作為精插補算法,該算法應用在控制卡中可以得到比較滿意的效果。計算過程中只需要相鄰4個點的位置數據,(x0,y0),(x1,y1),(x2,y2),(x3,y3),就可以構造出平滑的曲線。
公式以坐標分量形式表示為:
2.2 PID控制
在控制領域中,PID控制算法是一種常用的算法,PID是比例、積分、微分的縮寫。PID的合理的參數估計、比較,可以通過MATLAB的傳遞函數模型仿真來得到。
由于該系統是數字系統,采用的都是數字量,所以必須把PID算法離散化才能使用。又由于系統的存儲空間有限,算法的存儲空間開銷不能太大,所以采用了離散化的增量式PID算法。該算法在運算過程中只需要保留最近3次的誤差數據,就能夠推導出下一次的輸出量,節省了大量的數據空間,提高了運算速度,有很強實用價值。
公式如下:
![]()
μ( k ),μ( k-1 )分別是k和k-1時刻的輸出量,在系統中體現為DA的輸出量。
e( k ),e( k-1 ),e( k-2 )分別是k,k-1,k-2 時刻的偏差值,在系統中體現為該時刻實際位置與目標位置的偏差。
T,Td,Ti,Kp是PID公式的常量,不同的數值代表著PID系統的微分、積分、比例調節作用的強度和效果。
3 小結
在開放式數控系統中應用基于DSP+FPGA的運動控制卡,DSP承擔了CNC系統中實時性要求較高的模塊功能。利用DSP高速運算能力和實時信號處理能力,采用先進的Bs
pline插補算法,使該DSP運動控制卡具有高速、高精度的性能,結合FPGA芯片的先進技術,使該運動控制卡的集成性、可靠性大大提高。本運動控制卡目前是基于ISA總線設計的,今后將考慮把該系統移植到PCI總線上,將能進一步提高系統的處理速度能力,適應更高要求。
參考文獻
1 TMS320C3x User’s Guide, Texas Instruments, 2001
2 TMS320C3x General-Purpose Applications, Texas Instruments, 2001
3 孫家廣. 計算機圖形學. 清華大學出版社
4 解旭輝. 超精機床數控系統與伺服控制技術研究[D]. 長沙:國防科技大學, 1997
5 來曉嵐, 趙佳明, 盧煥章. DSP+FPGA實時信號處理系統, 電子技術應用, 2002.7
6 胡育文, 陳宏, 顧毅康. 基于DSP的電機控制器設計中的幾個問題. 中國自動化學會 ,1999.10
7 潘日紅, 潘日晶. 周期B樣條曲線的快速遞推升階方法. 福建師范大學學報(自然科學版), 2001.4
8 劉金琨. 先進PID控制及其MATLAB仿真. 電子工業出版社, 2003

pid控制器相關文章:pid控制器原理









評論