基于單片機的飛機發動機轉速測量系統的設計

由圖3可以看出,周期測量法是將被測的頻率信號fx經放大整形變成方波信號,再經過分頻器n分頻后,得到時間為Tx的門控信號,顯然:T=n/fx(1)
本文引用地址:http://www.104case.com/article/263371.htm 門控信號Tx的上升沿打開主控門,使計數器開始對標準頻率發生器發出的高頻標準頻率脈沖f進行計數,Tx下降沿關閉主控門,計數器停止計數。這時,計數器的計數值Nx為:Nx = Tx f(2),將式(1)代入式(2),可得:![]()
F/D轉換原理如圖4所示,測量開始時,首先被測信號fx在鎖存控制邏輯線路的控制下,fx為整周期時,對高頻和低頻計數同時發出鎖存控制信號,然后通過片選CS2/信號,將fx低頻計數值nx取走,通過CS1/將高頻計數鎖存器內容Nx取走。假設被測頻率的周期為tx,則鎖存控
那么,在Tx時間內,測得的平均
從以上分析可知,周期測量法一次測量的周期近似為Tx。在測量周期一定時,增加時鐘頻率f,計數器的計數脈沖Nx就多,由此便可減小量化誤差。因此,周期測量法具有測量周期短、測量精度和分辨率高的優點。
在工作過程中,單片機AT89S51采用中斷方式工作,每隔35ms中斷一次,在中斷間隔內完成大部分輸入/輸出任務。CPU響應中斷后經雙向數據總線向輸入接口組件發出一個口地址信號,選通輸入的頻率信號。待鎖存控制邏輯發出準備好信號時,CPU通過發送口地址信號取走對應的計數值,再解算出發動機的轉速。
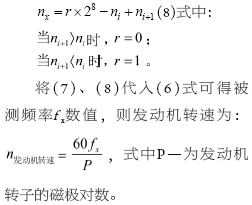
發動機轉速的計算采用了“同余”的方法,計數器不用清零,只需根據高、低頻計數器內前后兩次計數值Ni、Ni+1、ni、ni+1,再按前述計算方法求出所測轉速,具體算法如下:
![]()
3.2 系統軟件流程
系統軟件采用模塊化的設計思想,系統軟件主要由主程序、轉速計算子程序、自檢程序和顯示打印程序四個部分組成。

dc相關文章:dc是什么
51單片機相關文章:51單片機教程












評論