基于SMP 運動控制內核的機器人控制系統(tǒng)

3 機器人硬件構成
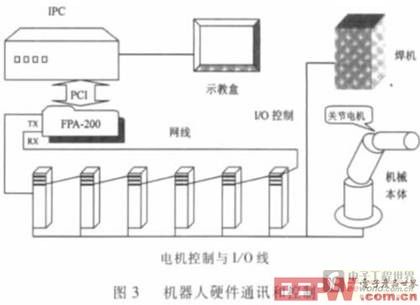
機器人的硬件結構由四個部分組成: 工業(yè)計算機和觸摸屏顯示示教盒、FPA-200 RTEX 網(wǎng)絡適配卡、松下A4N電機及伺服驅動器和機器人本體。
工業(yè)計算機是系統(tǒng)運行的硬件基礎, 示教盒的應用軟件界面直接面向對象操作。FPA-200 通過IPC 上的標準PCI 插槽與主機建立總線通信, 適配卡的工作電源同樣由PCI 總線提供。FPA-200 上RX、TX 兩個網(wǎng)絡結構接口, 利用100Mbit /s 的以太網(wǎng)絡將關節(jié)伺服驅動串聯(lián)起來, 并以0.5~1ms 的周期速度對六個關節(jié)伺服驅動實行高速循環(huán)控制和可編程加減速控制[3]。系統(tǒng)通訊具有極高的響應性和穩(wěn)定性。
伺服電機直接安裝在機器人關節(jié)上, 從機械內部走線。在機器人底部用標準航空插頭與伺服驅動連接。A4N 伺服驅動上的X5 接口提供了豐富的I /O接點, 通過PLC 編程, 由X5 接口上的I /O 點完成對焊槍能設備的控制, 如圖3 所示。











評論