一種多聲源數據采集系統設計及仿真

0 引言
本文引用地址:http://www.104case.com/article/245798.htm多聲源定位技術因其在智能機器人以及視頻會議等的廣泛應用而日益成為研究的熱點。基于麥克風陣列的多聲源定位是指采用麥克風陣列接收聲音信號,通過對采集到的多路信號進行分析及處理,并結合麥克風的幾何關系最終得出多個聲源的坐標。設計了多聲源數據采集系統仿真及實驗平臺。
計算機編程語言中,VisualBasic 6.0 是Microsoft 公司推出的面向對象的可視化開發編程工具, 具有豐富的數據類型和結構化程序結構,開發效率高,界面制作美觀方便等優點,且應用日益廣泛,故Visual Basic 6.0 語言做到了真正的面向對象編程。此外,在數據采集和數據處理的系統中,PC機軟件資源豐富,人際交互方便等優點。以PC 機作為實驗平臺,能實時快速的實現數據的采集及處理等。此外,實驗平臺能實現多聲源數據的同時采集,因此本設計采集到的數據能夠很好的應用于多聲源定位的算法研究中。
1 系統仿真的原理、組成及實驗平臺搭建
1.1 系統仿真中的麥克風陣列結構及信號模型
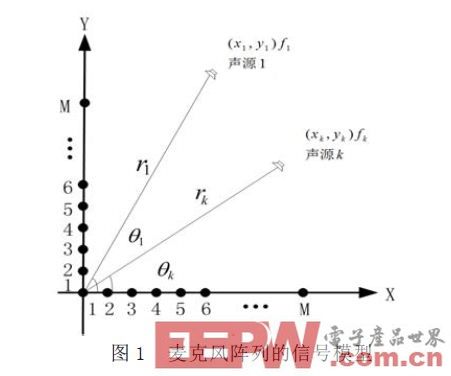
L 型麥克風陣列數學模型如圖1 所示:
?
?
上圖中的為聲源的位置, 為聲源的中心頻率,為聲源與軸連線的夾角, 為聲源到坐標原點的距離。L型麥克風陣列由X 軸和Y 軸上陣元個數均為M 的均勻線陣X,Y 構成,陣元間的距離為D,均小于信號波長的四分之一,陣列輸出的噪聲為均值為零,方差為的統計獨立的高斯白噪聲,和信號源不相關。
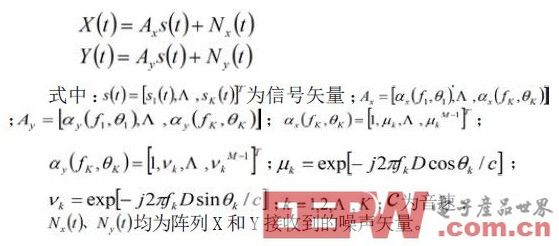
設平面內有K 個獨立的信號源發射到此陣列上,以坐標原點處陣元為參考陣元,則陣列X、Y 接收到的信號矢量分別為:
?
?
1.2 系統仿真結果
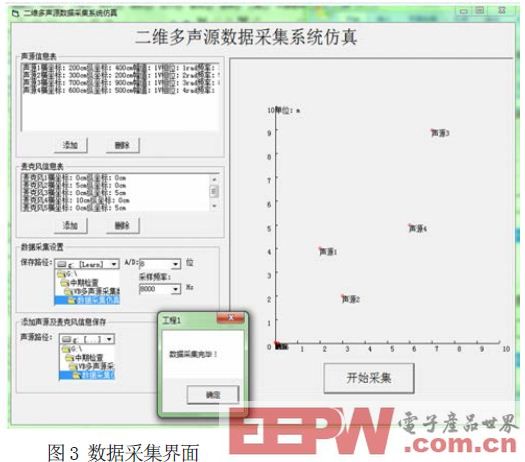
仿真界面主要包括:多個聲源位置,波形,幅值,相位及頻率的設置;坐標軸的橫、縱坐標范圍均為0-10 米;麥克風陣列的幾何位置;采樣頻率;A/D 轉換;采集數據集、聲源及麥克風添加信息的保存路徑等。
?
?
圖3 顯示添加的聲源及麥克風的信息,各麥克風得到的聲音信號波形如圖4 所示:
?

?
仿真最終要應用在實際中,仿真中采用的信號頻率范圍為聲源信號的范圍[20,20000]Hz,幅度范圍為[0,1]V,采樣頻率取值分別設置為8000Hz、90000Hz,A/D 轉換等。




評論