汽車電子的嵌入式設計與發展方向

(3) 在嵌入式實時操作系統的支持下能合理進行任務調度,充分利用系統資源;
(4) 硬件結構和軟件功能都有很強的擴展能力,系統集成度大大提高,降低了成本;
(5) 超低功耗,汽車靜態功耗為豪瓦級;
(6) 系統硬件抗干擾能力增強,適應高溫、潮濕、振動和電磁輻射等各種工作環境;
(7) 實時操作系統支持軟件多線程結構,增強了系統的軟件抗干擾性;
(8)提供強大的網絡通信功能,具備地IEEE1394、USB、CAN、Bluetooth或IrDA通信接口,支持相應的通信組網協議軟件和物理層驅動軟件,提供容錯數據傳輸能力和更大通信帶寬。
2.2 系統結構
汽車嵌入式SoC系統由硬件和軟件兩大部分組成。硬件包括嵌入式處理和外圍設備,軟件包括應用軟件和操作系統。軟件通過數據結構、算法和通訊協議實現汽車電子控制策略,硬件則為軟件提供了運行平臺,執行具體控制。
嵌入式SoC硬件系統集成度越來越高,一般為模塊化結構,如圖1(a)所示。在高性能CPU核心外通過IP總線擴展實時時鐘模塊、SRAM(靜態隨機存儲器)及大容量FLASH,配置CAN總線與USB通信模塊,無縫集成PWM輸出、多通道串口、A/D轉換接口與統一的高速緩沖存儲器,支持RISC技術、多級流水線技術與在片調試技術。系統的實時處理能力、可靠性和網絡通信能力大大增強。
現代汽車電子系統從單一控制逐漸發展到多變量多任務協調控制,軟件越來越龐大,越來越復雜,使得嵌入式系統需要尋找新的軟件解決方案。圖1(b)描述了汽車嵌入式SoC系統軟件的典型結構。它采用基于標準化接口和通訊協議的模塊化軟件設計,系統內部通訊由交互層直接完成,保障應用程序間的信息傳送。網絡層擁有數據流處理能力,是不同系統層面間信息交換的中間接口,能最大程度地整合系統資源。嵌入式實時操作系統摒棄了傳統操作系統的前后臺模式,使用總線驅動層和硬件抽象層管理I/O端口,合理分配CPU資源,采用基于優先級的事件管理策略,通過API(應用程序接口)調用應用程序,根據郵箱、消息隊列和信號量機制綜合管理中斷、系統行為和任務。
2.3 常用的SoC系統平臺
為適應汽車電子系統的發展潮流,各國的半異體和軟件制造商紛紛推出相應的嵌入式SoC產品。
著名的SoC硬件平臺包括:Intel公司的StrongArm核心處理器,擁有32位RISC數據總線、512KB的FLASH、256KB的SRAM和16位THUMB指令集,支持在片調試、三級流水線技術和LCD控制;Motorola公司的Dragonball核心處理器,它是32位RISC處理器,擁有16.85MHz時鐘頻率和2.7MIPS的處理速度,無縫集成SRAM、EPROM、FLASH、LCD控制器和PWM輸出,支持16位端口DRAM;NEC公司的VR核心處理器,它是64位RISC芯片,擁有300MHz時鐘和603MIPS的處理程度,集成統一的L2高速緩沖存儲器、DRAM控制器、PCI-X網橋和10/100MAC設備。著名的SoC軟件平臺即實時操作系統包括“QNX公司的QNX、Wind River公司的Vxworks和Integrated System公司的PSOSystem。它們都是實時、微核、基于優先級、消息傳遞、搶占式多任務、多用戶分布式網絡操作系統,擁有模塊化結構,內核運行高速穩定,通信能力和擴展裁剪能力很強。
在上述平臺中,StrongArm核心處理器和Dragonball核心處理器以及VxWorks操作系統在汽車SoC系統中有著良好的應用前景。
3 SoC系統的典型應用
汽車嵌入式SoC系統充分適應了汽車的工作環境和技術要求,在汽車電子技術上廣泛應用。其中北京理工大學正在研究的汽車ABS/ASR/ACC訂成化控制系統具有代表性。
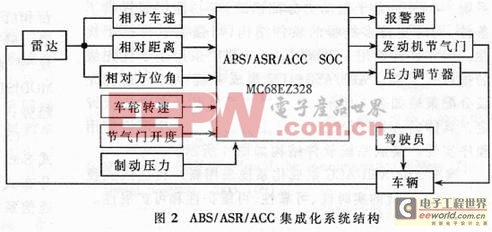
ABS/ASR/ACC集成化系統是綜合了制動防抱死功能(ABS)、驅動防滑功能(ASR)和自適應巡航功能(ACC)的汽車新型主動安全系統,系統結構如圖2所示。其在硬件上充分利用各個子系統的現有元件,輪速傳感器、發動機轉速傳感器、節氣門位置傳感器、加速踏板傳感器和探測雷達組成傳感器網絡,共用控制器和執行元件。在軟件上應用信息融合、集中控制技術,通過對制動力矩和發動機輸出功率的綜合調節實現汽車制動防抱死、驅動防滑和自適應巡航功能。控制過程充分考慮三個邏輯模塊上的相互關系,實現信息融合共享,例如ABS與ASR的車輪滑動率計算可以統一,ACC探測雷達獲取的車速信息可以用來修正ABS參考車速。
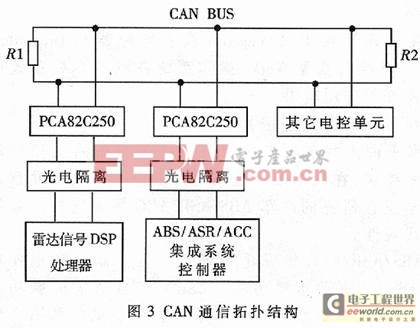
系統選用32位SoC硬件平臺如Dragon ball核心的MC68E328以代原來的16位ABS控制器,提高了硬件處理速度與抗干擾能力,端口資源也更豐富。車載雷達選用法國AutoCruise公司生產的AC110型77GHz毫米波車載協達,雷達信號的處理采用DSP處理器,并通過CAN總線與ABS/ASR/ACC集成系統控制器進行通信。CAN總線傳輸具有數據差動收發、容錯和非破壞性仲裁的能力,傳輸速率高達成Mbps。采用CAN通信提高了控制系統的實時性,并為系統功能擴展和整車傳感器信息共享提供了方便。CAN通信拓撲結構如圖3所示。











評論