基于Freescale單片機的電子控制空氣懸架模糊PID控制

3 仿真分析
利用MATLAB[4]軟件對控制算法進行了仿真,整個系統的采樣時間為0.01s。路面激勵的時域數學模型可以用來描述,其中q(t)為路面激勵,a為某一常數,根據路面等級選取,v為車速,w(t)為白噪聲。選用B級和C級路面對懸架系統仿真,車速均為50km/h。在MATLAB/SIMULINK中仿真得到路面的激勵[6],如圖8、圖9所示。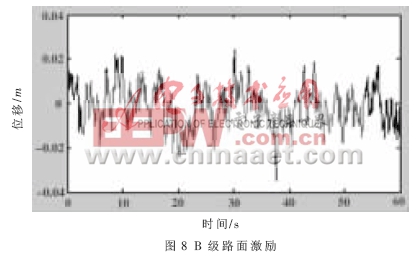
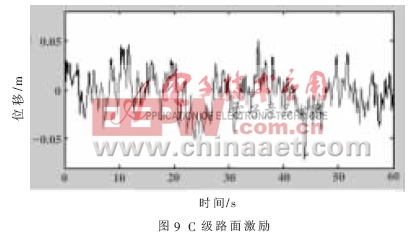
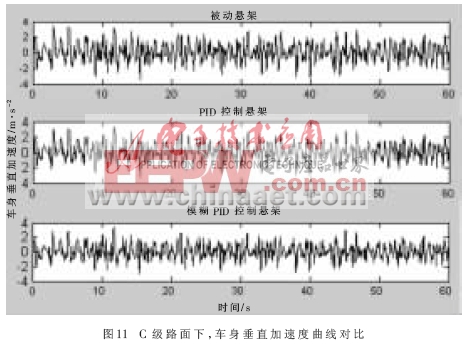
圖10、圖11分別為B級和C級路面50km/h車速條件下,被動懸架、PID控制和模糊PID控制懸架垂直加速度的對比。可以看出,模糊PID控制懸架與PID控制懸架和被動懸架相比,能有效降低車身垂直加速度。表2和表3為B級和C級路面激勵下的懸架性能對比。從表中可以看出,模糊PID控制懸架的各項性能均優于普通PID控制懸架和被動懸架,在B級和C級路面情況下,垂直加速度均方根值分別降低23.4%和17.3%,動行程分別降低1.9%和0.5%,車輪相對動載荷分別降低10%和7.9%,其改善量總體優于普通PID控制的改善量。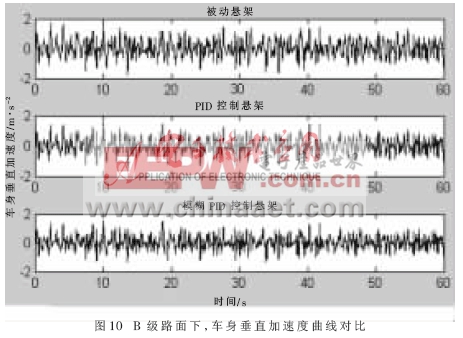


本文針對YBL6891H型客車,介紹了空氣懸架電子控制單元的電路結構,并用MULTISIM 10對高度傳感器檢測電路進行了仿真。采用模糊PID控制算法對空氣懸架進行控制,并對1/4懸架模型進行了仿真,結果說明,該算法能有效地降低車身垂直加速度,改善了車輛的行駛平順性和操縱穩定性,在B級和C級路面上,模糊PID控制懸架的加速度均方根比被動懸架分別降低了23.4%和17.3%,動行程和車輪相對動載荷均方根也有所改善。實踐證明,該電子控制懸架系統能滿足系統的整體要求,達到良好的控制效果。對車身的側傾角和俯仰角的控制是下一步要做的工作。

電子鎮流器相關文章:電子鎮流器工作原理
加速度計相關文章:加速度計原理
評論