PID控制在柔性結(jié)構(gòu)控制中的應(yīng)用

3 仿真分析
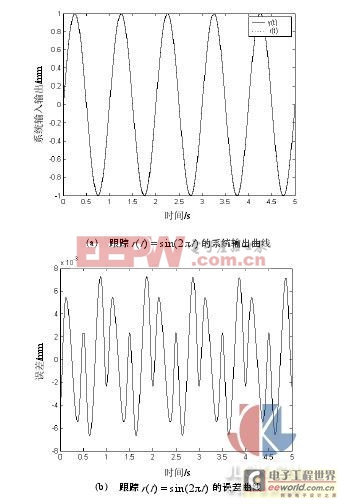
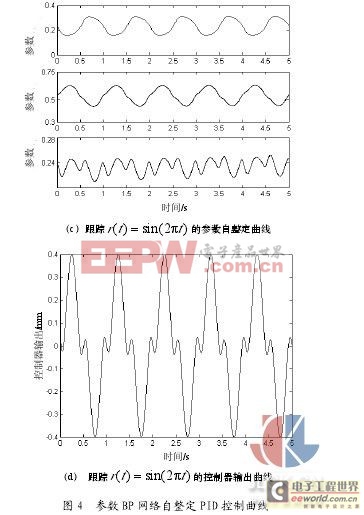
采用參數(shù) BP 網(wǎng)絡(luò)自整定 PID 控制對(duì) 50m 縮比實(shí)驗(yàn)?zāi)P瓦M(jìn)行了數(shù)值仿真,圖 4 給出了仿真結(jié)果。參數(shù) BP 網(wǎng)絡(luò)自整定 PID 控制器參數(shù)選取如下:神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)為 3-5-3,學(xué)習(xí)率 η =0.26、動(dòng)量項(xiàng)因子α =0.29、權(quán)系數(shù)初始值取區(qū)間[-0.5,0.5]上的隨機(jī)數(shù),采樣周期為 T=0.05s。
從參數(shù) BP 網(wǎng)絡(luò)自整定 PID 控制器系統(tǒng)的輸出響應(yīng),可調(diào)參數(shù)的調(diào)整情況、控制器輸出曲線以及大多數(shù)點(diǎn)的軌跡跟蹤誤差為±7mm左右(低于文獻(xiàn)[4]帶有學(xué)習(xí)功能的多變量調(diào)節(jié)器所得到的軌跡跟蹤誤差 10mm左右),可以看出參數(shù) BP 網(wǎng)絡(luò)自整定功能對(duì)克服懸索-饋源艙這樣一個(gè)非線性慢時(shí)變大滯后柔性特性有明顯作用。因此,該控制器能很好地跟蹤期望信號(hào),并能在很短的時(shí)間內(nèi)穩(wěn)定在跟蹤精度要求范圍內(nèi)。
4 結(jié) 論
針對(duì) LT 懸索-饋源艙這樣一個(gè)非線性慢時(shí)變大滯后柔性系統(tǒng):
(1)提出用參數(shù) BP 網(wǎng)絡(luò)自整定 PID 控制器來實(shí)現(xiàn)饋源艙軌跡跟蹤策略。通過對(duì)大射電望遠(yuǎn)鏡懸索-饋源艙系統(tǒng)的時(shí)變大滯后系統(tǒng)的數(shù)值仿真,證明該控制算法可以滿足饋源艙軌跡跟蹤精度要求,為新一代大射電望遠(yuǎn)鏡國(guó)際合作項(xiàng)目的工程實(shí)現(xiàn)奠定了基礎(chǔ)。
(2)該控制策略設(shè)計(jì)簡(jiǎn)單,易于實(shí)現(xiàn),系統(tǒng)輸出響應(yīng)快,超調(diào)量減小并且消除了極限環(huán)振蕩現(xiàn)象,提高了穩(wěn)態(tài)精度。神經(jīng)網(wǎng)絡(luò)與 PID 控制結(jié)合,將使PID 控制器具備處理更復(fù)雜的非線性系統(tǒng)的能力。
參考文獻(xiàn)
1 Duan B Y. A New Design Project of the Line Feed Structurefor Large Spherical Radio Telescope and its NonlinearDynamic Analysis.Int.J.Mechatronics, 1999, 9(1): 53~64.
2 Su Y X, Duan B Y. The Mechanical Design and KinematicsAccuracy Analysis of a Fine Tuning Stable Platform for theLarge Spherical Radio Telescope. Mechatronics, 2000, 10(7):819~834.
3 須田信英. PID 制御.システム制御情報(bào)ライブラリ—6,朝倉書店, 1992.
4 邱金波, 段寶巖, 彭勃, 等. 大型球面射電望遠(yuǎn)鏡控制系統(tǒng)研究. 自動(dòng)化學(xué)報(bào), 2001, 27(1): 93~97.
5 Hecht-Nielsen R. Theory of the Backpropagation NeualNetwork. IJCNN’89, 1989: 593~606.
6 陶永華, 尹怡新, 葛蘆生. 新型 PID 控制及其應(yīng)用. 北京:機(jī)械工業(yè)出版社, 1998.
7 蘇玉鑫, 段寶巖. 大射電望遠(yuǎn)鏡饋源艙軌跡跟蹤自適應(yīng)控制. 控制理論與應(yīng)用, 2002, 19(1): 121~124.





評(píng)論