PID控制在柔性結構控制中的應用

網絡的權系數修正采用一階梯度法(最速下降法),并附加使搜索能快速收斂于全局極小點的慣性項


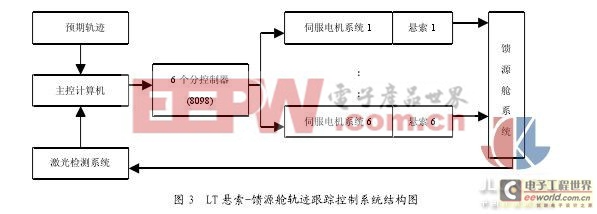
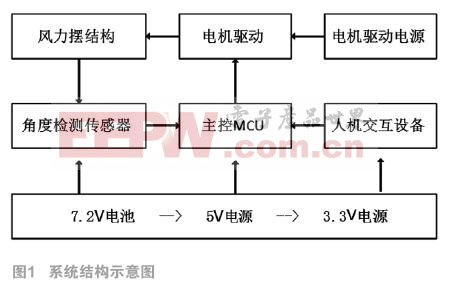
2 LT懸索-饋源艙軌跡跟蹤控制系統的結構及原理
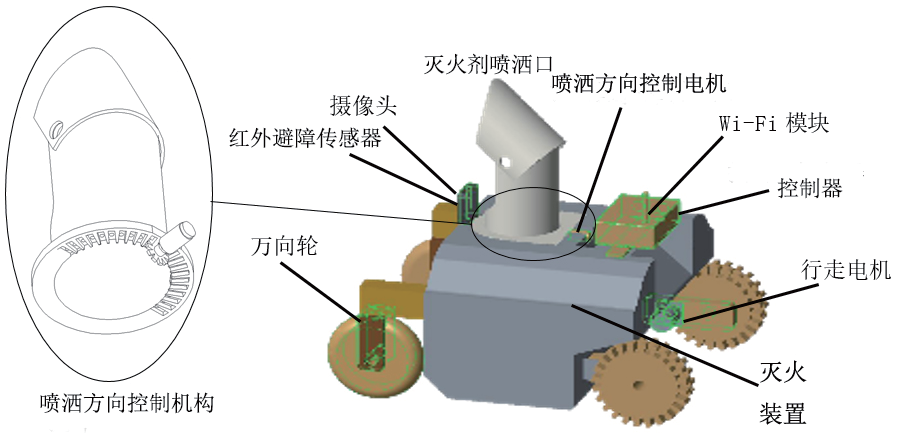
LT 懸索-饋源艙軌跡粗調跟蹤控制系統是由各個互連的子系統組成的非線性慢時變大滯后柔性系統,這種系統的關鍵是如何處理各個子系統的關聯性,而利用局部信息對各子系統進行分散控制是最有效的方法,因此采用分散控制,其系統結構如圖3 所示。饋源艙軌跡跟蹤過程中,激光檢測系統實時檢測饋源艙在空中的實際軌跡,并與預期軌跡進行比較,由主控計算機根據上述的偏差信號實現每根索長的實時規劃,求得索長輸入給相應懸索的分控制系統, 分控制系統通過合適的控制算法控制伺服電機的轉速,從而控制饋源艙在空中的運動軌跡滿足軌跡跟蹤精度的要求。也就是說,主控計算機主要完成每根懸索的運動軌跡規劃,即懸索運動協調問題是由主控計算機來保證的;而每根懸索的位置執行精度是由其相應的分控制系統中的控制算法來保證的。由于 6 根懸索的分控制系統中的控制算法是相同的,在此僅取其一來研究。單根懸索閉環位置控制系統主要由 8098 單片機、PWM 功率放大器、交流伺服電機、懸索和增量式光電編碼器組成。
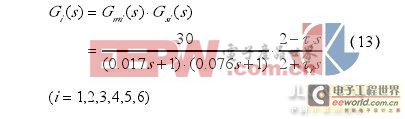
雖然不能精確建立懸索-饋源艙系統的數學模型,但可用伺服電機的二階慣性環節加懸索的純滯后環節來等效,并采用一階 Pade 近似純滯后環節。單根懸索-伺服電機的傳遞函數可表示為[7]
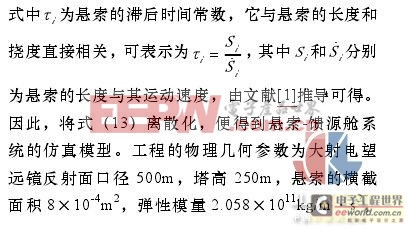
密度 7.85×103kg/m3,饋源艙總重量 2×104kg。





評論