CAN總線在電動汽車充電機上的應(yīng)用

充電機與電源模塊之間的通信主要是為了實現(xiàn)充電機的軟件并聯(lián)均流功能,在工作的過程中需要傳輸?shù)氖浅潆娺^程中的電壓電流等參數(shù)值,以及充電機的工作狀態(tài)等信息。其工作流程包括了以下幾個部分:
(1) 充電開始之前,電源模塊初始化,檢查工作狀態(tài),確定能否正常工作,設(shè)立允許或禁止充電標志位,并且將信息發(fā)送給主控制器;
(2) 充電機主控制器在得到電池信息,確定充電策略后,會選擇適當?shù)某潆娔K參與充電,并將充電的參數(shù)發(fā)送給電源模塊;
(3) 在充電機主控制器確認需要的電源模塊可以工作后,發(fā)出開始充電的指令,并采集充電的參數(shù);
(4) 主控制器根據(jù)采集的數(shù)據(jù)實時改變充電策略,調(diào)整充電參數(shù),并實時的監(jiān)控模塊的工作狀態(tài);
(5) 當發(fā)現(xiàn)充電過程中有電源模塊發(fā)出報警信息后,立即啟動備用模塊,并將問題模塊切除充電狀態(tài);
(6) 充電機的主控制器在綜合充電狀態(tài)信息后,做出停止充電的判斷,并結(jié)束充電過程,恢復(fù)待機狀態(tài)。
圖4為充電機內(nèi)部并聯(lián)均流的工作流程圖,將充電機主控制器和電源模塊的詳細工作流程做了規(guī)定,同時包括了can總線在其中的串聯(lián)作用。
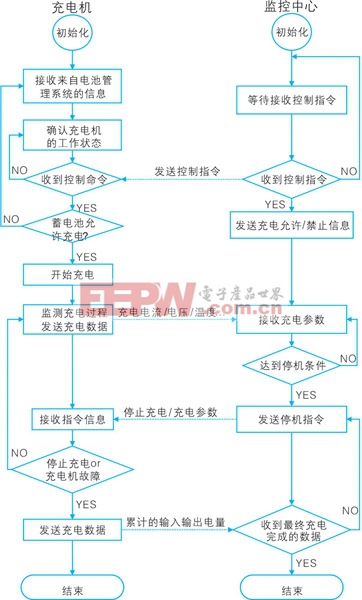
圖3 充電機與監(jiān)控中心的充電流程圖
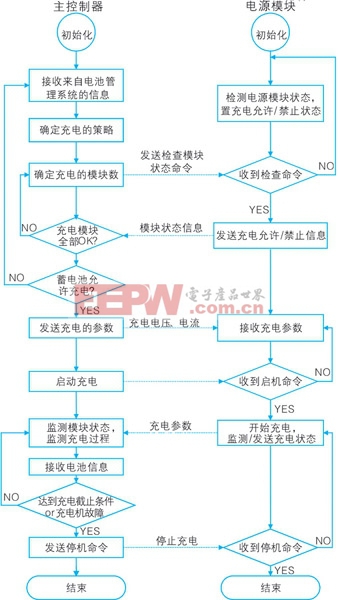
圖4 充電機內(nèi)部并聯(lián)均流工作流程圖
4 結(jié)束語
can總線作為一種可靠的網(wǎng)絡(luò)總線已經(jīng)在許多工業(yè)領(lǐng)域得到廣泛的應(yīng)用,由于can總線具有諸多的優(yōu)點,而且隨著can總線技術(shù)的不斷應(yīng)用和推廣,can總線在汽車充電機上的使用將會越來越廣泛。本文結(jié)合國家電網(wǎng)的充電機工作標準并根據(jù)實際充電機的工作情況,將can總線應(yīng)用在電動汽車充電機中,并將can總線應(yīng)用到充電機的具體的工作流程中,并根據(jù)實際的測試過程中對can通信的工作流程做出相應(yīng)的修改,能夠滿足充電機的高可靠性的要求。










評論