機(jī)器人控制系統(tǒng)運(yùn)動學(xué)方程

為什么使用運(yùn)動學(xué)?3自由度起重機(jī)
3自由度(DOF)起重機(jī)是一個(gè)相對簡單的機(jī)器人系統(tǒng),用戶可以控制起重距離、起重機(jī)回轉(zhuǎn)角度和起重機(jī)的傾角(見圖1)。通常一臺起重機(jī)還有第四個(gè)自由度——起重物體的懸掛高度,這里不考慮此自由度的作用,并不會影響分析結(jié)果的普適性。

圖1 一臺如圖所示的三自由度起重機(jī),允許用戶控制起重距離、回轉(zhuǎn)角和傾斜角,但是不允許起重機(jī)的工作端作直線運(yùn)動。資料來源:www.rki-us.com
通常,起重機(jī)的起重臂旋轉(zhuǎn)路徑就像一個(gè)圓弧,而且,如果起重臂傾斜角增加,終端受動物體(起重機(jī)末端的起重物)就會沿著圓弧路徑向上。這些自然形成的軌跡對于某些環(huán)境是可以接受的,然而,一旦用戶希望起重物體的運(yùn)動路徑是由很多線段組成的話,該怎么辦?或者是在任意三個(gè)方向上的隨意形狀,又該如何?例如起重物體是某些測量設(shè)備或者圖像采集系統(tǒng)。簡單的例子是將起重物體沿著方形軌跡移動,這對于一些系統(tǒng)是很有用的。
那些學(xué)習(xí)過坐標(biāo)幾何學(xué)的人應(yīng)該對起重機(jī)的受控坐標(biāo)系統(tǒng)很熟悉——通常就是球坐標(biāo)系。空間中的一個(gè)點(diǎn)可以用球坐標(biāo)系中的三個(gè)參數(shù)來表征:距離原點(diǎn)的距離、x-y平面上距離x軸的方位角θ(0 – 2π區(qū)間)和與z周的夾角θ(0 – π區(qū)間)。球坐標(biāo)系的圖例如圖2所示。
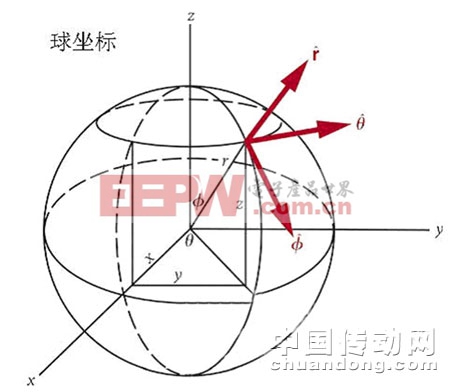
圖2 那些學(xué)習(xí)過坐標(biāo)幾何學(xué)的人應(yīng)該對起重機(jī)的受控坐標(biāo)系統(tǒng)很熟悉,通常就是球坐標(biāo)系。

陀螺儀相關(guān)文章:陀螺儀原理










評論