基于雙目立體視覺伺服的智能車室內彎道控制

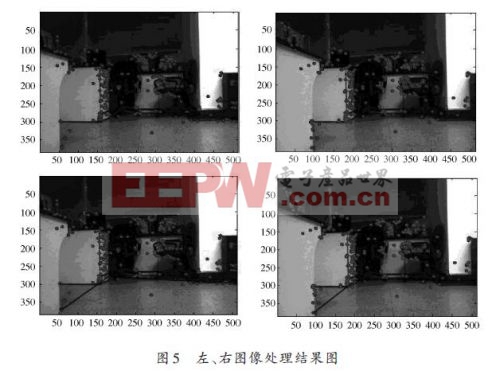
基于雙目立體視覺獲取得到的三維信息,即為經左右圖像SIFT特征點匹配,在攝像頭坐標系中獲取前景環境中各關鍵點的坐標信息。選取關鍵點中與機器人基坐標系原點高度靠近的點,并且該點的個數需大于3,之后,采用最小二乘法擬合可得行駛區域的邊界直線,即確定了車體定位參數中左、右車道線lL、lR。直線與圖像右邊界存在交點,即可判斷出彎道轉向。同時,擬合確定的左車道線與圖像下邊緣的交點Pl0為第一個控制點;以圖像右邊界與擬合直線的交點處為第二個控制點Pln。圖5表示為前景環境中對特征點的匹配結果圖和判斷可行駛區域。
對序列圖像進行實時處理時,由于攝像機采集系統速度為30幀/s,車速在不超過33cm/s的情況下,采集一幀圖像智能車向前行駛約小于1cm,連續采集的兩幀圖像中所判斷的車道左右車道線和彎道方向偏差不會太大。
2.2.2 控制仿真實驗
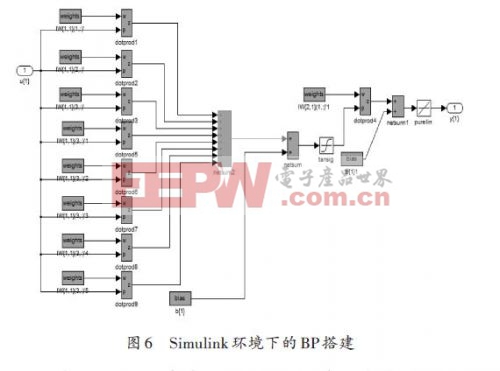
實驗采用BP神經網絡作為控制對偏離角φ進行仿真實驗。在Simulink環境下搭建的系統模型中BP神經網絡的搭建如圖6所示。U為經由視覺信息得到的偏航角φ作為系統輸入量,輸出Y為小車質心速度V。小車左、右輪速可在判斷彎道轉向的前提下,由兩輪速差VD經計算得出。若如圖5所示,彎道轉向向右:

利用Simulink庫中Signal Builder產生變化的Signal仿真實際環境中視覺系統得到的當前車體的偏移量。
小車經左右輪差速轉彎運動中質心位置實際偏轉角度作為網絡的輸入,經訓練學習反饋回系統的控制輸入端。圖7為控制仿真結果圖,由圖示可知該方法基本完成了對信號的控制跟蹤,由此說明了利用雙目立體視覺所獲得的信息,并采用BP網絡自學習對道路的變化可適用于不同彎道的道路,避免了傳統PID控制方法因彎道曲率變化使得小車轉彎控制失敗。
3 結論
借助機器視覺系統判斷小車可行駛區域,同時還可清晰地判斷出彎曲線路的走向,避免了彎道方向的復雜判別方法,且該方法普遍適用于不同的道路環境,特別是非結構化的道路環境,也增強了算法的實用性和魯棒性。但目前對雙目攝像機進行精確匹配和標定仍然是個技術難題;神經網絡訓練方法在選取訓練樣本數據和精確定位車輛位置方面也比較困難,這將是進一步研究的主要關鍵問題。















評論