移動機器人視覺定位方法的研究

將式(1) 離散化得:
其中n (k ) 為測量噪聲。假設n (k ) 為零均值的高斯白噪聲, 其方差陣為R (k ) = cov (n)。
則式(10, 11) 組成系統的離散狀態方程和測量方程, 當該系統滿足可觀測性條件:
時, 就可以應用推廣卡爾曼濾波對目標的空間位置和運動狀態進行估計。其中r ( t) , v ( t) 分別為目標相對于車體的位置和速度, 下標t 代表目標, i 代表成像系統, a ( t) 為任意的標量。
5 實驗結果
利用微軟提供的V FW 視頻處理開發軟件包,由CCD 攝像機和相應的視頻采集卡獲取移動機器人前的場景圖像數據, 在Delph i 6 下開發了移動機器人視覺定位與目標跟蹤系統的完整程序。本算法在CPU 主頻為500MHz, 內存為256MB 環境下, 對幀速率為25 幀?s, 圖像分辨率為320×240的共180 幀視頻圖像進行了實驗, 最終實現了對運動目標快速、穩定的跟蹤。圖3 給出了部分幀圖像的目標定位與跟蹤結果。

圖3 目標定位與跟蹤結果。
為了驗證本文提出的對目標的空間位置和運動參數估計算法的有效性, 利用獲取的目標質心點的位置時間序列對目標運動狀態進行了跟蹤仿真實驗。
由于仿真的相似性, 本文只給出了推廣卡爾曼濾波在O Z 方向的仿真結果, 如圖4 所示。其中圖4(a, b) 分別是觀測噪聲方差為3 個像素時目標在Z軸方向的位置p 和運動速度v 的估計誤差曲線(150 次Mon te Carlo 運行)。其中目標的起始位置為(115, 1, 10)m , 速度為(110, 115, 215)m /s, 加速度為(0125, 011, 015)m /s2; 攝相機運動為實際中容易實現的且滿足機動的條件, 其初始位置為( 010, 015, 010) m , 初始速度為( 015, 0175, 110)m /s, 運動加速度為(0125, 0105, 015)m /s2.
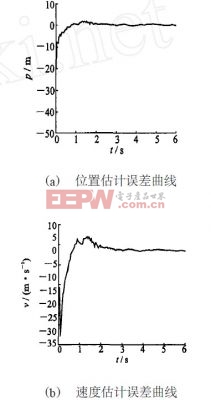
圖4 推廣卡爾曼濾波Z 方向(深度)的仿真結果
由仿真結果可見, 隨著機器人車體的不斷機動和濾波次數的增加, 目標位置的估計值在20 幀左右就可收斂到理論真值, 而且抖動很小, 可滿足系統快速定位與跟蹤要求。
6 結束語
本文對移動機器人的局部視覺定位方法進行了深入研究。二次成像法要求攝像機第二次成像時的位置要有較大變化, 從而導致利用序列圖像所獲取的目標位置信息誤差較大。與之相比本文提出的定位方法可更精確地得到目標的空間位置和運動參數。這為移動機器人的路徑規劃、伺服跟蹤等提供了更可靠的依據。










評論