移動機器人視覺定位方法的研究

質(zhì)心坐標計算公式如下:
式中:
 為質(zhì)心坐標; n 為目標區(qū)域占據(jù)的像素個數(shù), 且n≥2; (x i, y i) 為第i 個像素的坐標; p (x i, y i)為第i 個像素的灰度值。+
為質(zhì)心坐標; n 為目標區(qū)域占據(jù)的像素個數(shù), 且n≥2; (x i, y i) 為第i 個像素的坐標; p (x i, y i)為第i 個像素的灰度值。+
2.2 目標跟蹤
運動目標的跟蹤是確定同一物體在不同幀中位置的過程, 當運動目標被正確檢測出來時, 它就對相鄰幀中檢測出的目標進行匹配。匹配過程如下:
2. 2. 1 目標質(zhì)心位置預測
目標位置預測是依據(jù)最小二平方預測原理由目標質(zhì)心在本幀以及相鄰的連續(xù)前幾幀的位置值,直接預測出目標質(zhì)心在下一幀的位置值。在等間隔觀測條件下, 可用式(4) 的簡便預測:

2. 2. 2 搜索聚類的種子點
在搜索與上一幀圖像對應質(zhì)心點匹配的點時,采用基于子塊的模式匹配方法。子模塊是由待匹配的點與周圍8 個鄰點組成。由于這種方法充分考慮了特征點的統(tǒng)計特性, 識別率大大提高。
首先從預測質(zhì)心點開始, 在100×100 像素的動態(tài)窗口(以預測質(zhì)心點為中心) 內(nèi), 按照逆時針搜索周圍8 鄰域象素的趨勢進行環(huán)狀搜索, 并分別計算由每個搜索象素決定的子塊與上一幀的目標質(zhì)心點T 決定的子塊的HS 特征值之差的平方和。

其中P [ i ] [ j ] ( i, j = 0, 1, 2) 表示由點P 決定的子塊中的各個像素; T [ i ] [ j ] ( i, j = 0, 1, 2) 表示由上一幀的質(zhì)心點決定的子塊中的各個像素。
最后, 判定某個點P 是否與上一幀的特征點T 匹配的標準為: P 須同時滿足式(7, 8)。

其中P. H表示待匹配點P 的H 特征值;m eanH 表示目標區(qū)域的平均H 特征值; 滿足式(8) 能夠保證匹配點在目標區(qū)域內(nèi)。
2. 2. 3 聚類色塊區(qū)域
其目的是找出色塊區(qū)域, 色塊區(qū)域的質(zhì)心點即為特征跟蹤結(jié)果。在步驟(2) 中已經(jīng)找到了聚類的起始點, 由于H 反映圖像的色彩特性, 所以根據(jù)匹配點的H 特征值是否在由色塊的平均H 特征值確定的某個范圍內(nèi)來聚類色塊區(qū)域, 即滿足式(8)。這樣既可保證識別精度, 又減少了圖像信息計算量。
3 二次成像法
設Z c1, Z c2分別表示在t1, t2 時刻目標與成像系統(tǒng)的距離(深度值) ; d 1′, d 2′分別表示t1, t2 時刻目標在圖像平面的幾何特征值, 為便于表示, d 1′, d 2′可以是目標的像的外接圓直徑或者外接矩形的邊長, 則有:

式(9) 表明: 根據(jù)同一目標、同一攝像機所攝物體的圖像幾何特征的變化, 可以計算出它們在空間深度方向運動時距離所發(fā)生的變化, 這就是二次成像法的原理。
分析式(9) 可知, 二次成像法能夠確定目標在攝像機坐標系中的位置, 但該方法在攝相機兩次成像的位置變化不大的情況下誤差會比較大, 而且不能得到目標的運動信息。為此本文提出了利用序列圖像和推廣卡爾曼濾波來估計目標的空間位置和運動信息的方法。
4 目標的空間位置和運動參數(shù)估計
由于圖像序列前后兩幀的時間間隔T 很小,本文用二階微分方程來描述P 點的運動軌跡。定義狀態(tài)矢量:

則可以定義狀態(tài)方程為:

其中:
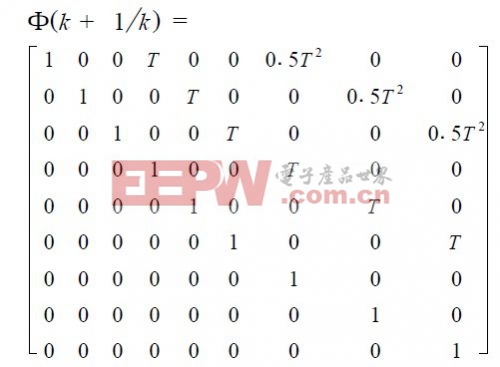
V (k ) 為模型噪聲, 假設V (k ) 為零均值的高斯白噪聲, 其方差陣為Q (k ) = cov (V)。










評論