未知負載情況下PWM逆變器的自適應重復控制

1 引言
閉環調節的PWM逆變器已被廣泛地應用于各種交流功率調節系統,例如UPS系統,自動電壓調節器(AVR’S)和可編程交流源(PAS’S)。這些應用都要求系統在有暫態或周期性負載擾動時保持低失真波形。研究PWM逆變器閉環調節的目的是提高系統的動態響應,而以往的大多數研究工作都集中在了通過同步反饋控制來提高暫態響應 。雖然這些研究能夠較好地克服暫態負載擾動,但當負載有周期性的擾動時,輸出波形依然存在著周期性失真。
重復控制理論來源于內模原理 ,內模原理指出:系統在穩定狀態下無穩態誤差的跟蹤參考輸入信號的前提條件是閉環控制系統穩定且閉環控制系統中包含有參考輸入信號的傳遞函數。它提供了一種消除由動態系統所產生的周期性誤差的方法。重復控制器也可視為周期波產生器,它通過反饋控制器進行閉環調節,從而消除了周期性誤差。為了降低對重復控制系統的苛刻要求,須對有限頻率模式進行方案上的改進,對于時變系統可用自適應重復控制方案來消除周期誤差 。本文所提出的這種新的自適應重復控制方案,采用輔助補償器來穩定閉環系統,并通過一個自適應調諧控制器對其參數進行調諧。自適應重復控制器能在設備變化的條件下保證閉環的穩定性。
2 重復控制系統
2.1 重復控制原理
一臺自動控制裝置要求在有未知的或是不可測量的擾動輸入時無穩態誤差,并要求通過調節控制變量來跟蹤相應的參考指令。在設計自動控制系統時,內模原理起到了至關重要的作用。內模原理提出 ,如果穩定的閉環系統中包括產生這些參考指令的模式,那么被控輸出將在沒有穩態誤差的情況下跟蹤一組參考輸入。因此內模原理顯示出其高精度,漸近性和跟蹤特性,并且可以通過在控制環內對模型的定位來獲取周期的外部輸入信號。通過使用基于微處理器的數字控制器,可以很容易的實現重復控制方案。由于微處理器和DSP都具有很高的性能,所以控制環路中還包含了其他的頻率模式,這充分表明了超精度自動控制系統方案的可行性。
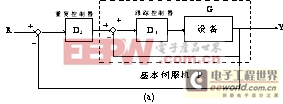

圖1 重復控制系統結構
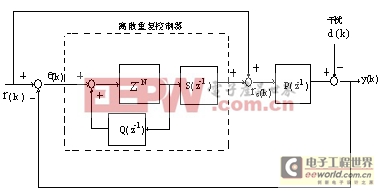
圖2 離散時間重復控制系統框圖
在重復控制系統中,除了傳統的跟蹤控制器外,還在控制環中插入了重復控制器。重復控制系統有多種控制結構,圖1所示為重復控制系統的基本結構,其中(a)圖為級聯型重復控制器,(b)圖提供了一條到重復控制器的前向反饋通道。跟蹤控制器的主要目的是提高系統的暫態響應,從而使系統不受外界擾動的影響。
圖2給出了離散時間重復控制系統的方框圖,其中P( )為逆變器的輸出與輸入的離散閉環轉移函數,該設備通過跟蹤控制器進行閉環調節,S()和Q()是重復控制控制器的輔助補償器,r(k)是參考信號,y(k)是系統輸出,e(k)是循跡誤差,
)為逆變器的輸出與輸入的離散閉環轉移函數,該設備通過跟蹤控制器進行閉環調節,S()和Q()是重復控制控制器的輔助補償器,r(k)是參考信號,y(k)是系統輸出,e(k)是循跡誤差, 是補償參考指令。
是補償參考指令。
由圖2可以看出,從干擾輸入d(k)循跡誤差e(k)的轉移函數為:
 (1)
(1)
其中E()和D()分別是e(k)和d(k)的z變換。相應的s域中頻率響應為:
 (2)
(2)
如果d(k)是以N為周期的干擾,那么d(k)的傅立葉級數可以表示為:
d(k) = 
 表示傅立葉系數,在特殊情況下,如果Q()=1且P()是穩定的,那么可以得到:
表示傅立葉系數,在特殊情況下,如果Q()=1且P()是穩定的,那么可以得到:
 (4)
(4)
這表明這些周期誤差的頻率模式已經通過重復控制器被消除,在此情況下將獲得良好的循跡效果。但同時也增加了合成S()時對穩定性的苛刻要求。在實際應用中,通過選擇Q()可降低這一要求,Q()可以是一個低通濾波器或是比單位1小的常數,如:
 (5)
(5)
其中的 指定了周期擾動在每一頻率模式下的衰減因數。
指定了周期擾動在每一頻率模式下的衰減因數。
閉環調節的PWM逆變器已被廣泛地應用于各種交流功率調節系統,例如UPS系統,自動電壓調節器(AVR’S)和可編程交流源(PAS’S)。這些應用都要求系統在有暫態或周期性負載擾動時保持低失真波形。研究PWM逆變器閉環調節的目的是提高系統的動態響應,而以往的大多數研究工作都集中在了通過同步反饋控制來提高暫態響應 。雖然這些研究能夠較好地克服暫態負載擾動,但當負載有周期性的擾動時,輸出波形依然存在著周期性失真。
重復控制理論來源于內模原理 ,內模原理指出:系統在穩定狀態下無穩態誤差的跟蹤參考輸入信號的前提條件是閉環控制系統穩定且閉環控制系統中包含有參考輸入信號的傳遞函數。它提供了一種消除由動態系統所產生的周期性誤差的方法。重復控制器也可視為周期波產生器,它通過反饋控制器進行閉環調節,從而消除了周期性誤差。為了降低對重復控制系統的苛刻要求,須對有限頻率模式進行方案上的改進,對于時變系統可用自適應重復控制方案來消除周期誤差 。本文所提出的這種新的自適應重復控制方案,采用輔助補償器來穩定閉環系統,并通過一個自適應調諧控制器對其參數進行調諧。自適應重復控制器能在設備變化的條件下保證閉環的穩定性。
2 重復控制系統
2.1 重復控制原理
一臺自動控制裝置要求在有未知的或是不可測量的擾動輸入時無穩態誤差,并要求通過調節控制變量來跟蹤相應的參考指令。在設計自動控制系統時,內模原理起到了至關重要的作用。內模原理提出 ,如果穩定的閉環系統中包括產生這些參考指令的模式,那么被控輸出將在沒有穩態誤差的情況下跟蹤一組參考輸入。因此內模原理顯示出其高精度,漸近性和跟蹤特性,并且可以通過在控制環內對模型的定位來獲取周期的外部輸入信號。通過使用基于微處理器的數字控制器,可以很容易的實現重復控制方案。由于微處理器和DSP都具有很高的性能,所以控制環路中還包含了其他的頻率模式,這充分表明了超精度自動控制系統方案的可行性。
在重復控制系統中,除了傳統的跟蹤控制器外,還在控制環中插入了重復控制器。重復控制系統有多種控制結構,圖1所示為重復控制系統的基本結構,其中(a)圖為級聯型重復控制器,(b)圖提供了一條到重復控制器的前向反饋通道。跟蹤控制器的主要目的是提高系統的暫態響應,從而使系統不受外界擾動的影響。
圖2給出了離散時間重復控制系統的方框圖,其中P(
由圖2可以看出,從干擾輸入d(k)循跡誤差e(k)的轉移函數為:
其中E(
如果d(k)是以N為周期的干擾,那么d(k)的傅立葉級數可以表示為:
這表明這些周期誤差的頻率模式已經通過重復控制器被消除,在此情況下將獲得良好的循跡效果。但同時也增加了合成S(
其中的

pwm相關文章:pwm原理
評論