直流電機優化控制系統設計(四)

3.6 轉速及電流檢測
3.5.1 光電編碼器測速原理
本文使用的電機軸上自帶了增量式光電編碼器HEDS5500-100,當碼盤轉動時,它的輸出信號是相位差為90°的A相和B相脈沖號。從A,B兩個輸出信號的相位關系(超前或滯后)可判斷旋轉的方向。波形原理圖如圖3-10所示。

圖3-10 光電編碼器順時針旋轉時的輸出波形
順時針旋轉時,A相超前B相90°。逆時針旋轉時,B相超前A相90°。根據兩相相位關系即可判斷出電機的旋轉方向。查閱該光電編碼應用手冊可知道,光電編碼器軸旋轉一周時,各相均輸出100個脈沖,根據該特點,可在一定時間內對編碼器輸出脈沖進行計數,經計算便可得到轉速。光電編碼器與ATmega16的接口如圖3-11所示。
轉向鑒別電路由D觸發器74LS74構成,當A超前B時,D觸發器輸出為高電平;當A滯后B時,D觸發器輸出低電平。根據D觸發器Q端的電平高低,即可判斷電機正轉和反轉。將A和B相中的一相脈沖(圖中為B相脈沖)送到ATmega16的T0定時/計數引腳進行計數,采用定時器T2進行定時,從而計算出電機轉速。
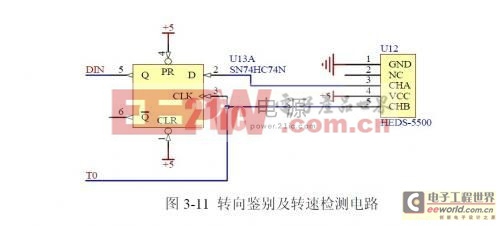
圖3-11 轉向鑒別及轉速檢測電路
3.5.2 電流檢測
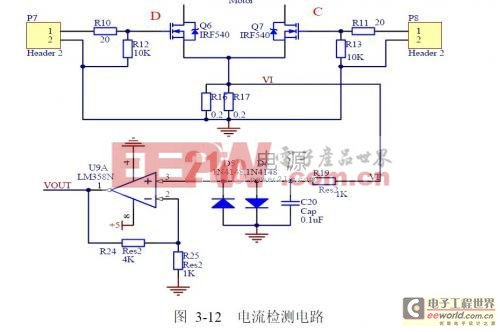
在H橋回路中串入采樣電阻,電流流過該電阻時產生壓降,通過檢測該電壓,即可計算出電機中的電流。若該電阻取得過大,則會影響H橋下臂的驅動電壓,取得過小,不利于提高檢測精度。這里我們取0.1Ω,當電機工作在額定狀態時,電流約為5A,此時,壓降為0.5V,再將該電壓放大5倍后,送入ATmega16的A/D轉換通道0。電流檢測電路如圖3-12所示。Vout接ATmega16的PA0腳即ADC0進行A/D轉換。電阻的功耗為:PR耗=I2R=52×0.1=2.5W。
選擇0.1Ω,5W的電阻即可滿足要求。R19與C20構成濾波電路。電機啟動時電流很大,此時運放輸入電壓也較大,為保護運放不受損壞,加入二極管D5與D6,對輸入電壓進行限幅。A/D檢測電壓V測與實際電流I關系為:V測=I×0.1×5(V)=0.5I(V)。





評論