M序列偽隨機碼在測距回答概率控制中的應用

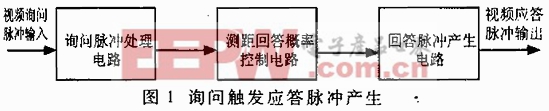 由測距原理可以知道,要對機載詢問器的測距性能指標進行檢測,就必須模擬地面應答器產生的回答脈沖。而在實際測距系統工作中,由于各種干擾存在,使測距回答率不可能達到100%。所以,為在不同回答數目情況下對機載訪問器進行綜合性能測試,需要對測距回答概率進行控制,以達到檢測目的。 本文通過對測距回答概率控制過程的特性分析,提出一種基于m序列偽隨機碼的實現方法,并給出了具體PLD實現電路。 1 設計方案 1.1 特性分析 模擬應答器由機載詢問脈沖觸產生回答脈沖,原理框圖如圖1所示。經模擬應答器接收機解調后的視頻詢問脈沖經過詢問脈沖處理電路處理后,輸出回答脈沖觸發信號;經測距回答概率控制電路進行回答概率判決,得到回答觸發信號;觸發回答脈沖產生電路產生視頻回答脈沖,經調制后發射,供機載詢問器接收處理。本文所研究的重點即測距回答概率控制電路。
由測距原理可以知道,要對機載詢問器的測距性能指標進行檢測,就必須模擬地面應答器產生的回答脈沖。而在實際測距系統工作中,由于各種干擾存在,使測距回答率不可能達到100%。所以,為在不同回答數目情況下對機載訪問器進行綜合性能測試,需要對測距回答概率進行控制,以達到檢測目的。 本文通過對測距回答概率控制過程的特性分析,提出一種基于m序列偽隨機碼的實現方法,并給出了具體PLD實現電路。 1 設計方案 1.1 特性分析 模擬應答器由機載詢問脈沖觸產生回答脈沖,原理框圖如圖1所示。經模擬應答器接收機解調后的視頻詢問脈沖經過詢問脈沖處理電路處理后,輸出回答脈沖觸發信號;經測距回答概率控制電路進行回答概率判決,得到回答觸發信號;觸發回答脈沖產生電路產生視頻回答脈沖,經調制后發射,供機載詢問器接收處理。本文所研究的重點即測距回答概率控制電路。 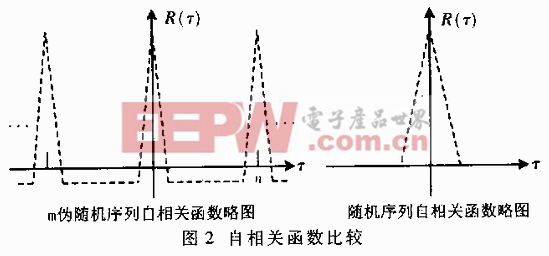 在測距回答概率控制工作過程中有幾個特性需要特別注意。首先,測距回答概率控制電路由詢問脈沖間接觸發,即視頻詢問脈沖經處理后產生的觸發信號為測距回答概率控制過程同步觸發信號;其次,根據檢測要求,測距回答概率范圍在0%~100%之間(一般達不到100%),并且以一定步進可調,如10%或20%等;第三,兩個測距回答概率控制電路輸出的回答脈沖觸發信號的時隔是隨機變化的,而不是按相等時間間隔平衡分配的;同時,測距回答概率控制電路的工作速率要快,以增強系統檢測性能。 1.2 理論方案 根據回答概率控制的特性知道,應把詢問脈沖經處理后產生的觸發信號作為測距回答概率控制電路的同步信號(或者說時鐘)。測距回答概率P回∈[0%,100%],以10%或20%步進可調。現以20%步進為例,其可調值為0%、20%、40%、60%、80%、100%,即P回為整個概率空間上的幾個離散點。
在測距回答概率控制工作過程中有幾個特性需要特別注意。首先,測距回答概率控制電路由詢問脈沖間接觸發,即視頻詢問脈沖經處理后產生的觸發信號為測距回答概率控制過程同步觸發信號;其次,根據檢測要求,測距回答概率范圍在0%~100%之間(一般達不到100%),并且以一定步進可調,如10%或20%等;第三,兩個測距回答概率控制電路輸出的回答脈沖觸發信號的時隔是隨機變化的,而不是按相等時間間隔平衡分配的;同時,測距回答概率控制電路的工作速率要快,以增強系統檢測性能。 1.2 理論方案 根據回答概率控制的特性知道,應把詢問脈沖經處理后產生的觸發信號作為測距回答概率控制電路的同步信號(或者說時鐘)。測距回答概率P回∈[0%,100%],以10%或20%步進可調。現以20%步進為例,其可調值為0%、20%、40%、60%、80%、100%,即P回為整個概率空間上的幾個離散點。 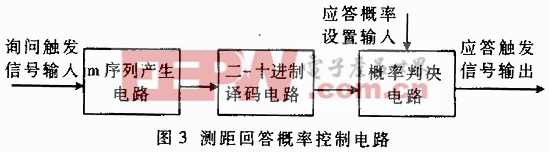 由于回答脈沖在固定概率控制下是隨機產生的,其產生過程是隨機過程,所以可以通過模擬具有隨機特性的隨機過程來實現固定概率下回答脈沖隨機的產生。 但是,一方面模擬產生完全符合隨機分布的隨機過程很難實現;另一方面,在實際機載詢問器檢測中,測距回答總數有限,利用完全符合正態分布的隨機過程隨機產生回答信號,很難達到所規定的測距回答概率控制要求。從這兩個方面出發,采用偽隨機過程,即具有周期性的隨機過程,而每個周期內的隨機變量近似服從隨機分布。
由于回答脈沖在固定概率控制下是隨機產生的,其產生過程是隨機過程,所以可以通過模擬具有隨機特性的隨機過程來實現固定概率下回答脈沖隨機的產生。 但是,一方面模擬產生完全符合隨機分布的隨機過程很難實現;另一方面,在實際機載詢問器檢測中,測距回答總數有限,利用完全符合正態分布的隨機過程隨機產生回答信號,很難達到所規定的測距回答概率控制要求。從這兩個方面出發,采用偽隨機過程,即具有周期性的隨機過程,而每個周期內的隨機變量近似服從隨機分布。 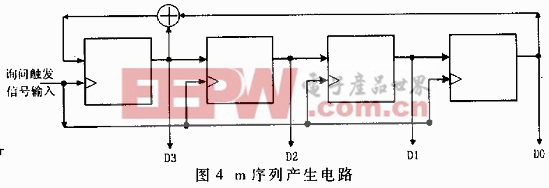 在這里,利用N位m序列產生周期n=2N-1的偽隨要序列,其自相關函數與平穩高斯隨機分布的自相關函數之間的比較如圖2所示。可見,m偽隨機序列的隨機性是具有周期性的,其周期為n,n即周期內隨機變量的個數。實際上,偽隨機序列就是隨機序列的周期沿拓。圖2中,τ為離散值。 由于m偽隨機序列在每個周期內有n(n≤2 N-1)個偽隨機數,具有近似離散隨機分布特性,這里把這個離散隨機分布特性與固定概率控制下的回答脈沖隨機產生相對應。而測距回答概率的控制則根據n個偽隨機數的數值大小作為門限來判定,
在這里,利用N位m序列產生周期n=2N-1的偽隨要序列,其自相關函數與平穩高斯隨機分布的自相關函數之間的比較如圖2所示。可見,m偽隨機序列的隨機性是具有周期性的,其周期為n,n即周期內隨機變量的個數。實際上,偽隨機序列就是隨機序列的周期沿拓。圖2中,τ為離散值。 由于m偽隨機序列在每個周期內有n(n≤2 N-1)個偽隨機數,具有近似離散隨機分布特性,這里把這個離散隨機分布特性與固定概率控制下的回答脈沖隨機產生相對應。而測距回答概率的控制則根據n個偽隨機數的數值大小作為門限來判定, 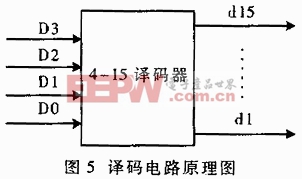 即把偽隨機數的值作為測距回答概率判決條件。具體判決過程如下: n個偽隨機數為x1,x2,…,xi,…,xn,xi∈(x1…xn);測距回答概率P回符合離散隨機分布特性,設x為由詢問信號觸的m序列發生器產生的偽隨機數,其值包含在n個偽隨機數的取值范圍內,則測距回答概率取值規則如下: P回(x≥x1)=n/n%26;#215;100%=100%; P回(x≥x2)=(n-1/n)%26;#215;100%; P回(x≥x3)=(n-2/n)%26;#215;100%; …… P回(x≥xn)=1/n%26;#215;100%; P回(設定為不回答狀態)=0%。 由以上各式,可以通過設定不同的偽隨機數值作為測距回答概率判決門限的方式,來設定不同的測距回答概率值。實際中,首先確定測距回答概率配置,然后通過不同的偽隨機數數值門限加以實現。其原理框圖如圖3所示。N位m序列產生電路在詢問觸發信號觸發下產生n個N位二進制偽隨機數,經譯碼電路進行二-十進制轉換,形成各種數值電平,由概率判決電路進行判決。若為設定測距回答概率判決門限之上的偽隨機數值,則輸出回答觸信號,否則沒有回答觸發信號輸出。其中,判決門限由測距回答概率設置輸入配置。
即把偽隨機數的值作為測距回答概率判決條件。具體判決過程如下: n個偽隨機數為x1,x2,…,xi,…,xn,xi∈(x1…xn);測距回答概率P回符合離散隨機分布特性,設x為由詢問信號觸的m序列發生器產生的偽隨機數,其值包含在n個偽隨機數的取值范圍內,則測距回答概率取值規則如下: P回(x≥x1)=n/n%26;#215;100%=100%; P回(x≥x2)=(n-1/n)%26;#215;100%; P回(x≥x3)=(n-2/n)%26;#215;100%; …… P回(x≥xn)=1/n%26;#215;100%; P回(設定為不回答狀態)=0%。 由以上各式,可以通過設定不同的偽隨機數值作為測距回答概率判決門限的方式,來設定不同的測距回答概率值。實際中,首先確定測距回答概率配置,然后通過不同的偽隨機數數值門限加以實現。其原理框圖如圖3所示。N位m序列產生電路在詢問觸發信號觸發下產生n個N位二進制偽隨機數,經譯碼電路進行二-十進制轉換,形成各種數值電平,由概率判決電路進行判決。若為設定測距回答概率判決門限之上的偽隨機數值,則輸出回答觸信號,否則沒有回答觸發信號輸出。其中,判決門限由測距回答概率設置輸入配置。 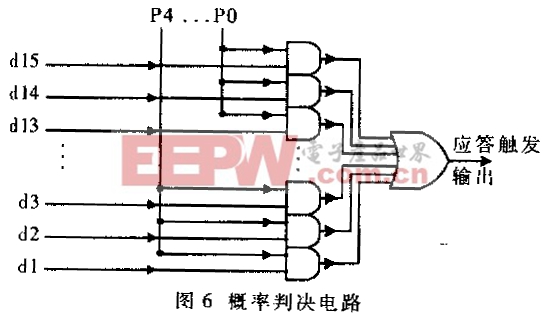 2 具體實現 為提高電路的工作效率并使其具有靈活的可編程性能,采用PLD可編程邏輯器件實現。現以N=4位m序列偽隨機數產生器為例詳細介紹一下(測距回答概率步進為20%)。 2.1 m序列產生電路 以四級(N=4)移位寄存器構成周期為n=2n-1=15的m序列偽隨機數產生器,本原多項式為f(x)=1+x+x4,原理圖如圖4所示。利用詢問觸發信號作為m序列產生器同步時鐘,4位并行輸出二進制數產生周期為15的偽隨機數,產生的偽隨機數如表1所示。 表1 偽隨機數列表 觸發序號 D3 D2 D1 D0 偽隨機數譯碼輸出 1 1 0 0 0 8 d8 2 1 1 0 0 12 d12 3 1 1 1 0 14 d14 4 1 1 1 1 15 d15 5 0 1 1 1 7 d7 6 1 0 1 1 11 d11 7 0 1 0 1 5 d5 8 1 0 1 0 10 d10 9 1 1 0 1 13 d13 10 0 1 1 0 6 d6 11 0 0 1 1 3 d3 12 1 0 0 1 9 d9 13 0 1 0 0 4 d4 14 0 0 1 0 2 d2 15 0 0 0 1 1 d1 2.2 二-十進制譯碼電路 譯碼電路原理圖如圖5所示。四位二進制偽隨機數碼經4-15譯碼器譯為d1~d15輸出,高電平有效,d1~d15與偽隨機數的對應關系如表1所示。當每一個詢問觸發信號到來時,m序列產生1個偽隨機數,對應d1~d15中有一個為高電平。 2.3 測距回答概率判決電路 各個偽隨機數值作為門限時的測距回答概率如下: P回(x≥1)=15/15%26;#215;100%=100%; P回(x≥2)=(14/15)%26;#215;100%; …… P回(x≥15)=1/15%26;#215;100%; P回(設定為不回答狀態)=0%。 門限為1,P回(x≥1)=15/15%26;#215;100%=100%,d1~d15任意有效均有輸出; 門限為4,P回(x≥4)=12/15%26;#215;100%=80%,d4~d15任意有效均有輸出; 門限為7,P回(x≥7)=9/15%26;#215;100%=60%,d7~d15任意有效均有輸出; 門限為10,P回(x≥10)=6/15%26;#215;100%=40%,d10~d15任意有效均有輸出; 門限為13,P回(x≥13)=3/15%26;#215;100%=20%,d13~d15任意有效均有輸出; 不回答狀態,P回(不回答)=0%,d1~d15任意有效均無輸出。 無回答狀態就是封閉概率控制電路的觸發輸出信號,無論產生偽隨機數值為多少,人為造成詢問不回答狀態。判決電路如圖6所示。譯碼門輸出的d1~d15電平信號,分別與外部測距回答概率設定電平P0~P4相與后,經同一個或門輸出。d1~d15每三個一組,分別與P0~P4相與,即d1~d3分別與P4,……,d13~d15分別與P0相與。顯然,只有當d1~d15任何一個電平與相對應的P0~P4中的一個電平同時為高電平時,或門輸出回答觸發信號,高電平有效,此時啟動回答。其中測距回答概率設定電平P0~P4由外部配置,其電平配置與測距回答概率設定數值的對應關系如表2所示。 表2 電平配置與測距回答概率設定數值的對應關系 P4 P3 P2 P1 P0 測距回答概率 1 1 1 1 1 100% 0 1 1 1 1 80% 0 0 1 1 1 60% 0 0 0 1 1 40% 0 0 0 0 1 20% 0 0 0 0 0 0% 2.4 提高步進精度的改進電路 要使測距回答概率控制步進精度進一步提高,如達到10%,若用以上方法,取步進門限1時,P回(步進)=1/15%26;#215;100%=6.7%,取步進門限2時,
2 具體實現 為提高電路的工作效率并使其具有靈活的可編程性能,采用PLD可編程邏輯器件實現。現以N=4位m序列偽隨機數產生器為例詳細介紹一下(測距回答概率步進為20%)。 2.1 m序列產生電路 以四級(N=4)移位寄存器構成周期為n=2n-1=15的m序列偽隨機數產生器,本原多項式為f(x)=1+x+x4,原理圖如圖4所示。利用詢問觸發信號作為m序列產生器同步時鐘,4位并行輸出二進制數產生周期為15的偽隨機數,產生的偽隨機數如表1所示。 表1 偽隨機數列表 觸發序號 D3 D2 D1 D0 偽隨機數譯碼輸出 1 1 0 0 0 8 d8 2 1 1 0 0 12 d12 3 1 1 1 0 14 d14 4 1 1 1 1 15 d15 5 0 1 1 1 7 d7 6 1 0 1 1 11 d11 7 0 1 0 1 5 d5 8 1 0 1 0 10 d10 9 1 1 0 1 13 d13 10 0 1 1 0 6 d6 11 0 0 1 1 3 d3 12 1 0 0 1 9 d9 13 0 1 0 0 4 d4 14 0 0 1 0 2 d2 15 0 0 0 1 1 d1 2.2 二-十進制譯碼電路 譯碼電路原理圖如圖5所示。四位二進制偽隨機數碼經4-15譯碼器譯為d1~d15輸出,高電平有效,d1~d15與偽隨機數的對應關系如表1所示。當每一個詢問觸發信號到來時,m序列產生1個偽隨機數,對應d1~d15中有一個為高電平。 2.3 測距回答概率判決電路 各個偽隨機數值作為門限時的測距回答概率如下: P回(x≥1)=15/15%26;#215;100%=100%; P回(x≥2)=(14/15)%26;#215;100%; …… P回(x≥15)=1/15%26;#215;100%; P回(設定為不回答狀態)=0%。 門限為1,P回(x≥1)=15/15%26;#215;100%=100%,d1~d15任意有效均有輸出; 門限為4,P回(x≥4)=12/15%26;#215;100%=80%,d4~d15任意有效均有輸出; 門限為7,P回(x≥7)=9/15%26;#215;100%=60%,d7~d15任意有效均有輸出; 門限為10,P回(x≥10)=6/15%26;#215;100%=40%,d10~d15任意有效均有輸出; 門限為13,P回(x≥13)=3/15%26;#215;100%=20%,d13~d15任意有效均有輸出; 不回答狀態,P回(不回答)=0%,d1~d15任意有效均無輸出。 無回答狀態就是封閉概率控制電路的觸發輸出信號,無論產生偽隨機數值為多少,人為造成詢問不回答狀態。判決電路如圖6所示。譯碼門輸出的d1~d15電平信號,分別與外部測距回答概率設定電平P0~P4相與后,經同一個或門輸出。d1~d15每三個一組,分別與P0~P4相與,即d1~d3分別與P4,……,d13~d15分別與P0相與。顯然,只有當d1~d15任何一個電平與相對應的P0~P4中的一個電平同時為高電平時,或門輸出回答觸發信號,高電平有效,此時啟動回答。其中測距回答概率設定電平P0~P4由外部配置,其電平配置與測距回答概率設定數值的對應關系如表2所示。 表2 電平配置與測距回答概率設定數值的對應關系 P4 P3 P2 P1 P0 測距回答概率 1 1 1 1 1 100% 0 1 1 1 1 80% 0 0 1 1 1 60% 0 0 0 1 1 40% 0 0 0 0 1 20% 0 0 0 0 0 0% 2.4 提高步進精度的改進電路 要使測距回答概率控制步進精度進一步提高,如達到10%,若用以上方法,取步進門限1時,P回(步進)=1/15%26;#215;100%=6.7%,取步進門限2時, 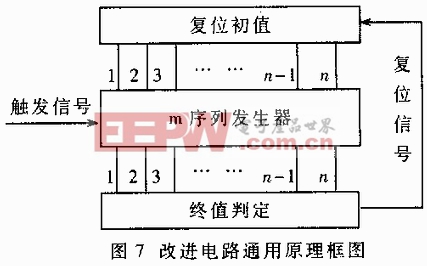 P回(步進)=2/15%26;#215;100%=13.3%,因而只有取步進門限1.5時才可達到P回(步進)=1.5/15%26;#215;100%=10%的步進要求。但按前面的方案,門限不可以取分數,所以用以上電路提高步進精度誤差太大。因此,必須重新選取產生偽隨機數個數,以適應步進精度提高的要求。為兼顧測距回答隨機性與提高步進精度兩個方面的要求,對于10%步進,選用5位m序列產生器,利用反饋方式把其隨要內戰數減少為20個。其它步進精度要求的可由此方法實現。其實現通用的原理框圖如圖7所示。 根據用于檢測機載詢問器性能的模擬回答信號的測距回答概率控制特性可知,該方案達到了要求,滿足了測距回答概率配置要求。以一定步進可調,且測距回答概率步進精度可以通過改進電路來提高;同時,m序列偽隨機數的隨機產生性符合測距回答信號隨機產生特點,偽隨機碼的周期隨機性,也符合詢問檢測次數有限的特性。利用PLD可編程邏輯器件來實現,不但有利于在線調試電路,而且可以靈活地改進電路,利于開發。
P回(步進)=2/15%26;#215;100%=13.3%,因而只有取步進門限1.5時才可達到P回(步進)=1.5/15%26;#215;100%=10%的步進要求。但按前面的方案,門限不可以取分數,所以用以上電路提高步進精度誤差太大。因此,必須重新選取產生偽隨機數個數,以適應步進精度提高的要求。為兼顧測距回答隨機性與提高步進精度兩個方面的要求,對于10%步進,選用5位m序列產生器,利用反饋方式把其隨要內戰數減少為20個。其它步進精度要求的可由此方法實現。其實現通用的原理框圖如圖7所示。 根據用于檢測機載詢問器性能的模擬回答信號的測距回答概率控制特性可知,該方案達到了要求,滿足了測距回答概率配置要求。以一定步進可調,且測距回答概率步進精度可以通過改進電路來提高;同時,m序列偽隨機數的隨機產生性符合測距回答信號隨機產生特點,偽隨機碼的周期隨機性,也符合詢問檢測次數有限的特性。利用PLD可編程邏輯器件來實現,不但有利于在線調試電路,而且可以靈活地改進電路,利于開發。

評論