51單片機和CPLD的望遠鏡伺服控制器設計

式中,Tm是機械時間常數,K是增益。因此可以選擇內模控制器為:

式中,λ是濾波器參數。如圖5所示,點畫線內的部分可等效為反饋控制器:
![]()
當模型匹配時,存在內模控制系統閉環為一慣性環節。它的時間可以依據需要進行調節,λ值小有利于動態性能,λ值大則有利于增強魯棒性。對于內模控制器輸出不飽和而言,其等效于反饋控制器PI,因而,系統對階躍輸入和階躍擾動的穩態誤差為零,其抗干擾能力與常規PI完全一致。采用增量式PID控制算法,控制變量為:

式中,ek為第k步時刻速度誤差,Ts為采樣周期,μ(k)為當前控制量輸出。
4 實驗結果
采用基于高速單片機C8051F120和CPLDEPM570T100設計的伺服控制器硬件平臺,實現大型望遠鏡轉臺的速度控制,驅動功率級采用H橋雙極性功率放大器,反饋采用直徑為413 mm的圓光柵,柵道64800,細分1000,分辨率為0.02"/s,采樣周期1 ms,控制回路計算時間測得為120μs,包含圓光柵數據讀取時間。望遠鏡的一轉臺的速度傳遞函數為: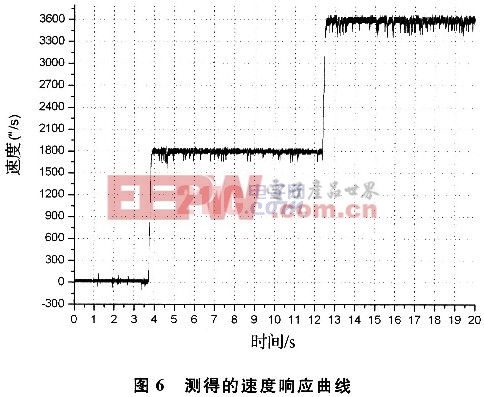
利用板上的通信口發送實際的速度值(波特率115200bps,1ms發送1次),由上位計算機記錄數據,測得的速度響應曲線如圖6所示。起始階段電機以20"/s的低速度運行,中間升至1800"/s,最后達到3600"/s,可見每個階段的速度都非常平穩。在實際數據處理時,需要對零
位信號時刻的圓光柵數據進行處理,因該光柵有零位信號輸出,計算速度時要進行合理的辨別方向和大小分析處理
結語
本文采用高速單片機和CPLD組成望遠鏡伺服控制器,實現了圓光柵四倍頻細分電路、計數模塊以及電機PWM驅動控制信號產生,并用單片機實現了內模控制算法、LCD顯示和數據通信等功能。最終通過實驗驗證了該系統的可行性。

pid控制器相關文章:pid控制器原理





評論