51單片機和CPLD的望遠(yuǎn)鏡伺服控制器設(shè)計

2.2 時鐘電路
CPLD的全局時鐘為100MHz,對其進行分頻提供給內(nèi)部各個模塊,如計數(shù)模塊電路、PWM處理電路和單片機的中斷信號。100MHz可分頻成1kHz、500 Hz、50Hz。本設(shè)計中,采樣周期為1ms,即1kHz采樣頻率,用于單片機的外部中斷信號。在采樣周期內(nèi),單片機完成對圓光柵計數(shù)采樣、速度計算、算法實現(xiàn)、PWM控制變量產(chǎn)生,以及過程狀態(tài)變量賦值等工作。實際測得完成單個電機控制所需的時間為120μs左右,剩余時間可用于實現(xiàn)LCD顯示控制和通信功能。可見,利用該單片機可以勝任望遠(yuǎn)鏡伺服閉環(huán)工作。
2.3 PWM脈沖電路
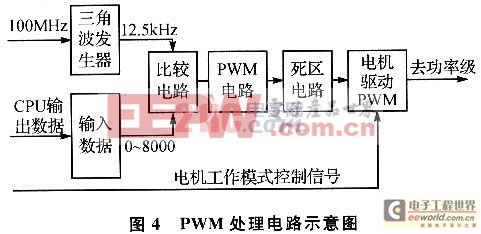
功率級采用H橋電路,需要4路帶死區(qū)的PWM信號,避免直通。如圖4所示,首先由100 MHz產(chǎn)生12.5kHz的三角波信號,與單片機輸出的數(shù)據(jù)(0~8000)進行比較,得到1路PWM信號(數(shù)據(jù)的大小決定占空比的值,O對應(yīng)O%,8000對應(yīng)100%),再由該PWM信號產(chǎn)生與之反向的信號。同時,經(jīng)死區(qū)電路得到2路死區(qū)時間至少為5μs的PWM信號,以及經(jīng)電機工作模式控制電路處理得到的4路驅(qū)動功率級PWM信號,可控制電機工作在單極性或雙極性方式。當(dāng)需要控制多個電機時,采用上述方法同樣處理就行,這就是CPLD靈活性的具體體現(xiàn)。
2.4 其他電路
轉(zhuǎn)臺上的限位信號、功率級的故障信號、外部邏輯數(shù)字信號等輸入到CPLD,進行相應(yīng)的邏輯處理(如輸出使能和停止),從而達到對電機的有效控制和保護。
3 控制算法實現(xiàn)
在控制算法的實現(xiàn)上采用內(nèi)模控制。其設(shè)計思路是將對象模型與實際對象相并聯(lián),控制器逼近模型的動態(tài)逆。對單變量系統(tǒng)而言,內(nèi)模控制器取為模型最小相位部分的逆,并通過附加低通濾波器增強系統(tǒng)的魯棒性。模型和被控對象模型精確匹配時,控制系統(tǒng)的輸入等于輸出。內(nèi)模控制能夠清楚地表明調(diào)節(jié)參數(shù)和閉環(huán)響應(yīng)及魯棒性的關(guān)系,內(nèi)模控制器的動態(tài)特性取決于內(nèi)部模型與被控對象的匹配情況。
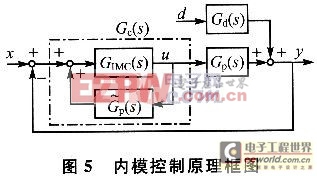
內(nèi)模控制原理框圖如圖5所示。其中,GP(s)為控制對象*****為內(nèi)部模型,GIMC(s)為內(nèi)模控制器,Gd(s)為外界干擾模型;x、u、y分別為給定輸入、控制量、對象輸出,d為外界干擾。在工業(yè)過程中,與經(jīng)典PID控制相比,內(nèi)模控制僅有一個整定參數(shù),參數(shù)調(diào)整與系統(tǒng)動態(tài)品質(zhì)和魯棒性的關(guān)系比較明確,故采用內(nèi)模控制原理可以提高PID控制器的設(shè)計水平。由于參數(shù)調(diào)節(jié)簡單,此算法利于單片機程序?qū)崿F(xiàn)。

pid控制器相關(guān)文章:pid控制器原理





評論