51單片機和CPLD的望遠鏡伺服控制器設計

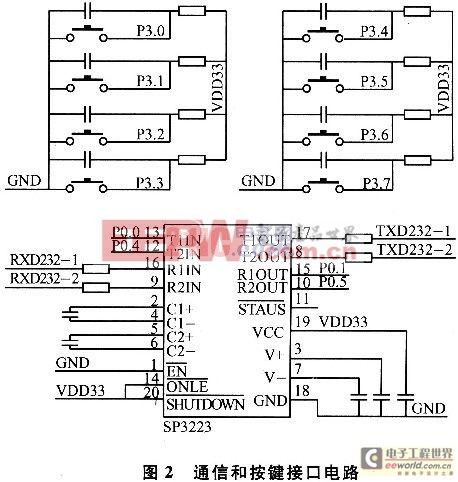
LCD顯示模塊主要顯示系統的狀態變量值,如位置、速度、編碼器值等信息。采用串口電平轉換收發器SP3223實現與上位機的兩路RS232通信,可完成工作模式(如定點、等速模式),以及數值大小的設定;同時,單片機可實時地將工作狀態變量送至上位機,利于數據記錄和分析。控制器參數(如比例系數KP和積分系數KI等)也可由上位機進行設置,對于開放式運動控制模塊,這是必需的。
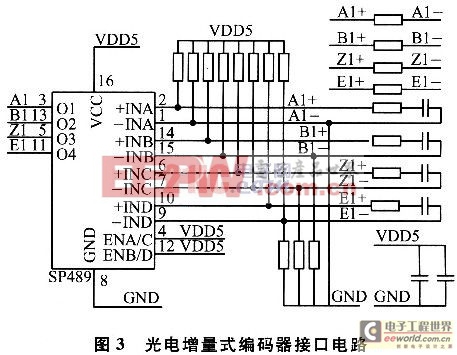
另外,設計了8路按鍵,用于功能參數設置等。如圖2所示。光電增量式編碼器的接口一般為RS422差分對輸入接口。
如圖3所示,光電增量式編碼器接口電路具有終端匹配電阻和濾波網絡電路,可增強抗干擾能力。其中,接口芯片SP489將RS422信號轉換為TTL電平。
2 CPLD片上各模塊實現
2.1 倍頻鑒向和計數電路
經過圖3所示的編碼器接口電路處理后,輸出TTL電平的A1、B1、Z1信號到CPLD。首先,對波形進行整形、數字濾波處理;經過4細分后,進入辨向電路;然后由可逆計數電路完成對脈沖的計數,輸出32位的二進制碼值;單片機在每個采樣周期中讀取計數值來獲得位置值,通過微分即可得到速度值。望遠鏡的位置反饋圓光柵輸出的AB碼頻率可達10MHz,高頻CPLDEPM570T100完全可以勝任。在CPLD輸入端口進行施密特觸發和濾波處理,以避免尖峰毛刺干擾,進一步增強系統魯棒性。

pid控制器相關文章:pid控制器原理





評論