基于AVR單片機的智能小車的設計與制作

l.3 單片機控制模塊
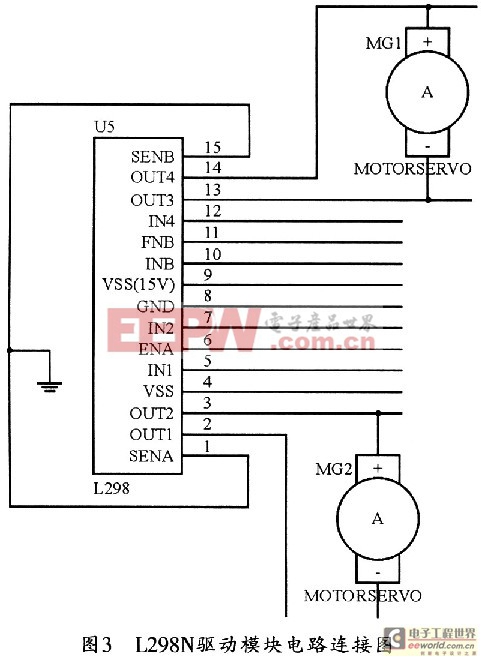
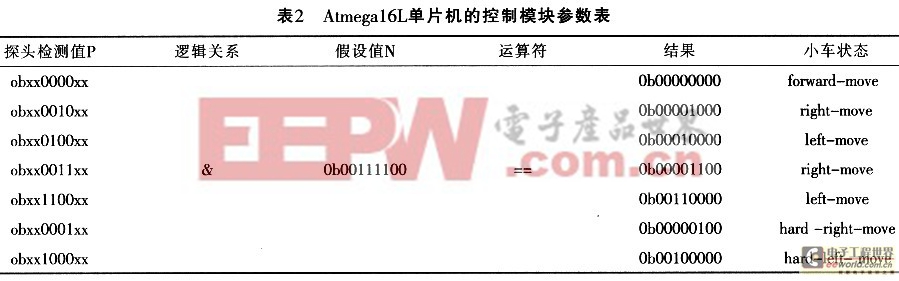
采用Atmel公司的Atmegal6L單片機可對小車進行控制,該單片機具有32個功能強大的可編程I/O接口和4個PWM通道,并具有八路十位ADC,可對小車進行實時控制。該單片機的PC0~PC7八個端口可與光電傳感模塊的八個光電探頭相連。設探頭檢測的邏輯實際值為P,假定值N,車輪的運動狀態分別為forward-move、right-move、leftmove、hard-right-move、hard-left-move,通過對實際值P與假定值N(0b0011-1100)的比較,可得出如表2所列的Atmegal6L單片機的控制模塊參數表,其中x為無關項。設計時,可將Atmegal6L的PD2~PD3分別連接帶碼盤的兩個光電對管,以用于精確測量車輪的轉向與位移;PD5和PD4可分別連在電機驅動模塊的使能端ENA和ENB。PDl、PD0、PD6和PD7分別于電機驅動模塊的INl、IN2、IN3、IN4相連,INl、IN2口一般用于PWM的輸入,以便利用PWM調速法,即由單片機輸出一系列頻率固定的方波,并通過功率放大器來驅動電機,再通過單片機編程來改變輸出方波的占空比,這樣就可改變加在電機上的平均電壓,從而改變電機的轉速。
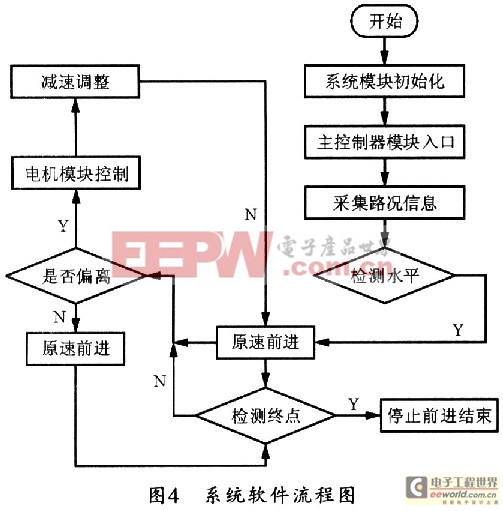
2 智能小車的軟件設計方案
基于AVR單片機和C語言編程的系統軟件流程圖如圖4所示。
3 結束語
本文著重討論了光電傳感器、單片機控制和穩壓器原理及這幾個模塊之間的相互溝通與協調關系,本系統采用便宜的紅外對管,并以具有強大功能的ATmagel6L單片機為主控制器,同時以L298N驅動芯片通過C語言程序編寫調試軟件,從而完成了能夠智能循跡、自動避障、結構模塊化、抗干擾能力強的智能小車的設計。該系統通過對小車的調試,能夠使小車成功平穩地在任意給定的黑線上行駛,而且循跡效果很好,運行十分平穩,同時速度也很快,而且在拐彎處不會因速度大而產生離心現象。
智能小車在軍事、民用、科研、航天探測領域已得到廣泛的應用,它的發展與自動控制、單片機開發、控制算法的優化和微機存儲處理速度有著密切的關系,很值得進一步的研究與探索。

pid控制器相關文章:pid控制器原理
交換機相關文章:交換機工作原理









評論