基于AVR單片機的智能小車的設計與制作

O 引言
自工業革命以來,隨著電氣的發展,人類進入了文明的新階段。機器人已經廣泛用于工業、農業、服務業、軍事、機械、交通、航天航空等領域。智能機器人水平的不斷提高,大大提高了勞動效率,減輕了勞動強度。機器人與人類并肩作戰,在征服自然,改造自然地過程中發揮著重要作用。
智能小車是集理論力學、機械結構、數字電路、模擬電路、傳感器、單片機、控制理論和算法等多門學科為一體的綜合系統,其內容涵蓋機械、電子、自動控制原理、計算機、傳感技術等多個學科和領域。
本文設計的基于ATmagel6L的智能小車就是要求其從起跑線出發,然后通過自身自動調整向角和車速,使其自動沿著一條黑色引導線行駛。
1 智能小車的硬件設計方案
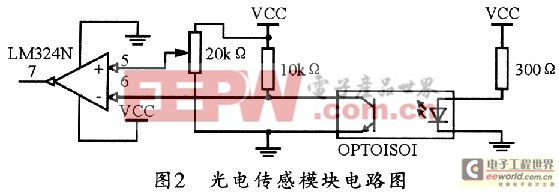
本智能小車控制系統的結構如圖1所示。其中的Atmegal6L單片機是智能小車的控制模塊,它是高性能、低功耗的8位AVR微處理器,采用先進的RISC結構,具有16K字節的系統內可編程Flash和512字節的EEPROM。工作于16 MHz時,其性能高達16 MIPS,并具有32個可編程通用I/0口和用于邊界掃描的JTAG接口,基本都能夠滿足設計要求。電路穩壓模塊輸入12 V電壓。經過穩壓電路后可得到9 V、5 V兩種電壓,其中9 V電壓用于電機驅動模塊的工作電壓,5 V電壓則用于單片機的工作。圖2所示是RPR220光電傳感模塊的電路圖,光電傳感是由10個RPR220型光電對管組成。RPR220是一種一體化反射型光電探測器,其發射器是一個砷化鎵紅外發光二極管,而接收器則是一個高靈敏度的硅平面光電三極管。L298N的INPUT、OUTPUT兩端口用于提供穩定的電壓以使電機轉動。

1.1 光電傳感模塊
圖2所示是本系統中光電傳感模塊的電路圖。尋線路徑一般是刻在白色平面上的3 cm的黑線,小車沿著黑線循徑,當檢測到白線,即二極管發出的光被白線反射回來時,光電對管中的三極管導通,比較器6號端口輸入為低電平,經過比較器后,7號端口輸出為高電平。當檢測到黑線時,光被吸收,光強度減弱,光電對管中的三極管不導通,比較器6號端輸入為高電平,7號端輸出為低電平。通過PC端口將高低電平(l和0)反饋給單片機后,經單片機處理后可用于調整車頭的轉向,以使黑線剛好在10個光電探頭的中間,從而使小車平穩前進。在7號端串一個0.1μF的電容再接地,這樣,經過濾波后進入到單片機中的方波就非常完美。將這個光電管與碼盤相連,通過光電管不斷掃描碼盤格數,這樣,當碼盤轉動且轉速較低時,6號端的信號就可變為頻率與轉速一一對應的方波。但是,當碼盤速度很快時,6號端信號將變為頻率與轉速一一對應的正弦信號。放大器LM324可用作比較器,可將6號端處的正弦信號與基準電壓進行比較后,然后將在7號端產生頻率與轉速一一對應的方波,單片機采集此信號后,即可根據公式計算出直流電機的各個參數,從而精確地控制小車的轉向與位移。
1.2 電機驅動模塊
圖3所示是L298N驅動模塊的電路連接圖。L298N作為電機驅動芯片,是一款高電壓大電流全橋驅動芯片,它的頻率高,可控制兩個直流電機,而且具有控制使能端,工作電壓可通過4、9引腳分別輸入9 V、5 V電壓。ENA、ENB引腳是兩個使能端口,而INT、OUT則為電機驅動引腳,通過改變OUT端的邏輯電平可控制電機的正、反、停止狀態,表1所列是直流電機控制邏輯。L298N的5、6、7、10、ll、12六個引腳可直接與單片機的PD端口相連,而通過對單片機的編程則可以實現直流電機PWM調速。
|

pid控制器相關文章:pid控制器原理
交換機相關文章:交換機工作原理









評論