| 從前面敘述可知,如果一個線性控制系統是穩定的,那么從任何初始條件開始,經過一段時間就可以認為它的過渡過程已經結束,進入與初始條件無關而僅由外作用決定的狀態,即穩態。控制系統在穩態下的精度如何,這是它的一個重要的技術指標,通常用穩態下輸出量的要求值與實際值之間的差來衡量。如果這個差是常數,則稱為穩態誤差。 控制系統的穩態誤差是因輸入信號不同而不同的。因此就需要規定一些典型輸入信號。通過評價系統在這些典型輸入信號作用下的穩態誤差來衡量和比較系統的穩態性能。在控制工程中通常采用的典型輸入信號有以下幾種: 1.單位階躍函數: 其拉普拉斯變換為R(s)=1/s。 2.單位斜坡函數 其拉普拉斯變換為R(s)=1/s2。 3.單位加速度函數: 其拉普拉斯變換為R(s)=1/s3。 4.單位脈沖函數 其拉普拉斯變換為R(s)=1。 5.正弦函數: 其中最常用的典型信號為單位階躍、單位斜坡、單位加速度三種輸入信號。 3.2.2穩態誤差和誤差傳遞函數 系統的穩態誤差是指系統在穩定狀態下其實際輸出值(在實際工作中常用系統輸出的測量值代替)與給定值之差。對穩定的單輸入單輸出系統,穩態誤差是時域中衡量系統穩態響應的性能指標,它反映了系統的穩態精度,因此穩態誤差分析是控制系統分析的一項基本內容。 設有如圖3-1所示的系統。它的閉環傳函為 誤差信號e(t)和輸入信號r(t)之間的傳遞函數是 其中誤差e(t)是輸入信號和反饋信號之差。 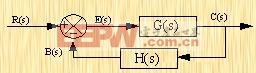 | | | 圖3-1控制系統 |
終值定理為求穩定系統的穩態誤差提供了一個簡便的方法。因為E(s)是 則穩態誤差是
3.2.3 靜態誤差系數 當系統的輸入信號為單位階躍、單位斜坡和單位加速度三種典型信號之一時,上式分別化為: 單輸入單輸出線性系統的傳遞函數一般表示為: 單位階躍函數: 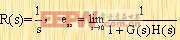 | (3-2) |
單位斜坡函數: 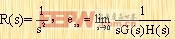 | (3-3) |
單位加速度函數: 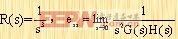 | (3-4) |
現定義誤差系數如下: 靜態位置誤差系數Kp:  | (3-5) |
靜態速度誤差系數Kv:  | (3-6) |
靜態加速度誤差系數Ka:  | (3-7) |
將(3-5),(3-6)及(3-7)分別代入(3-2),(3-3)及(3-4)得 單位階躍函數:  | (3-8) |
單位斜坡函數:  | (3-9) |
單位加速度函數:  | (3-10) |
下面進一步考察誤差系數與系統的結構和參數的關系。 系統開環傳遞函數一般寫成  | (3-11) |
的形式,式中K是系統的開環比例系數。分母中的因子sυ表明開環傳遞函數中含有υ個積分單元。將系統按照υ=0,1,2分別將其分為0型,1型,2型。在表3-1中列出了按照式(3-2),(3-3)及(3-4)求得的系統穩態誤差系數。 | 0型系統 | 1型系統 | 2型系統 | | (階躍輸入)r(t)=1(t) | | 0 | 0 | | (斜坡輸入)r(t)=t/td> | ∞ | | 0 | | (加速度輸入)r(t)=t2/2 | ∞ | ∞ | |
| 表3-1 0型、1型及2型系統以增益K表示的穩態誤差 |
誤差系數Kp、Kv和Ka描述了系統減少或消除穩態誤差的能力,系數值愈大,則給定穩態誤差終值愈小。一般來說,在保持瞬態響應在一個允許的范圍內時,希望增加誤差系數,如果在靜態速度誤差系數和加速
技術專區
主站蜘蛛池模板:
鹤岗市|
如皋市|
吉隆县|
祁阳县|
南宁市|
横峰县|
丰顺县|
松溪县|
即墨市|
合川市|
绥德县|
元氏县|
通州市|
凤台县|
弥勒县|
兴仁县|
军事|
庄浪县|
吉木萨尔县|
务川|
榆社县|
新河县|
伊吾县|
华蓥市|
南京市|
宕昌县|
泰州市|
越西县|
塔河县|
乃东县|
沈阳市|
大埔县|
道真|
延吉市|
阳东县|
哈巴河县|
遂宁市|
拉萨市|
兴海县|
民丰县|
鄂温|
| 


















評論