控制系統(tǒng)可以由許多元件組成。為了表明每一個元件在系統(tǒng)中的功能,在控制工程中,常常應(yīng)用所謂"方塊圖"的概念。方塊圖是描述控制系統(tǒng)的另一種比較直觀的模型,在控制系統(tǒng)的分析中,用方塊圖進(jìn)行處理具有相當(dāng)明顯的優(yōu)勢。
方塊圖 :
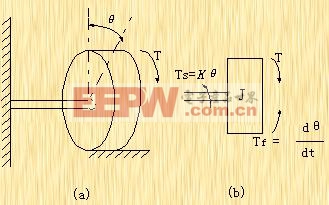
系統(tǒng)方塊圖,是系統(tǒng)中每個元件的功能和信號流號的圖解表示。方塊圖表明了系統(tǒng)中各種元件間的相互關(guān)系。方塊圖優(yōu)于純抽象的數(shù)學(xué)表達(dá)式,因?yàn)樗軌蚯宄乇砻鲗?shí)際系統(tǒng)中的信號流動情況。 在方塊圖中,通過函數(shù)方塊,可以將所有的系統(tǒng)變量聯(lián)系起來。"函數(shù)方塊"或簡稱為"方塊",是對加到方塊上的輸入信號的一種運(yùn)算符號,運(yùn)算結(jié)果以輸出量表示。元件的傳遞函數(shù),通常寫進(jìn)相應(yīng)的方塊中,并以標(biāo)明信號流向的箭頭,將這些方塊連接起來。應(yīng)當(dāng)指出,信號只能沿箭頭方向通過。這樣,控制系統(tǒng)的方塊圖就清楚地表示了它的單向特性。 T為慣性環(huán)節(jié)的時間常數(shù),K為比例系數(shù)。
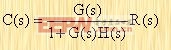
當(dāng)輸入信號為單位階躍函數(shù)時,其環(huán)節(jié)的輸出為 圖2-4表示了一個方塊圖單元。指向方塊的箭頭表示輸入,而從方塊出來的箭頭則表示輸出。在這些箭頭上標(biāo)明了相應(yīng)的信號。 應(yīng)當(dāng)指出,方塊輸出信號等于輸入信號與方塊中傳遞函數(shù)的乘積。 用方塊圖表示系統(tǒng)的優(yōu)點(diǎn)是:只要依據(jù)信號的流向,將各元件的方塊連結(jié)起來,就能夠容易地組成整個系統(tǒng)的方塊圖,通過方塊圖,還可以評價每一個元件對系統(tǒng)性能的影響。 總之,方塊圖比物理系統(tǒng)本身更容易體現(xiàn)系統(tǒng)的函數(shù)功能。方塊圖包含了與系統(tǒng)動態(tài)特性有關(guān)的信息,但它不包括與系統(tǒng)物理結(jié)構(gòu)有關(guān)的信息。因此,許多完全不同和根本無關(guān)的系統(tǒng),可以用同一個方塊圖來表示。 應(yīng)當(dāng)指出,在方塊圖中沒有明顯表示出系統(tǒng)的主能源,而且對于一定的系統(tǒng)來說,方塊圖也不是唯一的。由于分析角度的不同,對于同一個系統(tǒng),可以畫出許多不同的方塊圖。 誤差檢測器 誤差檢測器產(chǎn)生的輸出信號,等于控制系統(tǒng)的參考輸入信號與反饋信號之差。在設(shè)計中,選擇誤差檢測器是一件很重要的工作,需要仔細(xì)確定。因?yàn)檎`差檢測器中的任何缺陷,都必然會降低整個系統(tǒng)的性能。圖2-5表示了誤差檢測器的方塊圖。 需要注意的是,圖中進(jìn)行相加或相減的一些量,應(yīng)具有相同的量綱和單位。 閉環(huán)系統(tǒng)方塊圖 在圖2-6上,表示了一個閉環(huán)系統(tǒng)的方塊圖。輸出量C(s)反饋到相加點(diǎn),并且在相加點(diǎn)與參考輸入量R(s)進(jìn)行比較。系統(tǒng)的閉環(huán)性質(zhì),在圖上清楚地表示了出來。在這種情況下,方塊的輸出量C(s),等于方塊的輸入量E(s)乘以傳遞函數(shù)G(s)。 任何線性控制系統(tǒng),都可以用由方塊、相加點(diǎn)和分支點(diǎn)組成的方塊圖來表示。所謂分支點(diǎn),就是由方塊出來的輸出信號,從這一點(diǎn)起同時進(jìn)入另一個方塊或相加點(diǎn)。 當(dāng)輸出量反饋到相加點(diǎn)與輸入量進(jìn)行比較時,必須將輸出信號轉(zhuǎn)變?yōu)榕c輸入信號相同的形式。例如,在溫度控制系統(tǒng)中,輸出信號通常為被控溫度。具有溫度量綱的輸出信號,在與輸入信號進(jìn)行比較之前,必須轉(zhuǎn)變?yōu)榱蛭恢谩_@種轉(zhuǎn)換由反饋元件來完成,反饋元件的另一個重要作用,是在輸出量與輸入量進(jìn)行比較之前,改變輸出量。對于正在討論的例子,反饋到相加點(diǎn)與輸入量進(jìn)行比較的反饋信號為B(s)=H(s)C(s)。 反饋信號B(s)與作用誤差信號E(s)之比,叫做開環(huán)傳遞函數(shù)。即 輸出量C(s)與作用誤差信號E(s)之比,叫做前向傳遞函數(shù),因而 如果反饋傳遞函數(shù)等于1,那么開環(huán)傳遞函數(shù)與前向傳遞函數(shù)相同。在圖2-6所示系統(tǒng)中,輸出量C(s)與輸入量R(s)的關(guān)系,可推導(dǎo)如下: C(s)=G(s)E(s)
E(s)=R(s)-B(s)=R(s)-H(s)C(s)
從上述方程中消去E(s),得
C(s)=G(s)[R(s)-H(s)C(s)]
于是可得 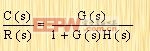 | (2-17) |
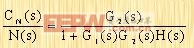
C(s)與R(s)之間的傳遞函數(shù),叫做閉環(huán)傳遞函數(shù)。這一傳遞函數(shù),將閉環(huán)系統(tǒng)的動特性,與前向通道元件和反饋通道元件的動態(tài)特性聯(lián)系在一起了。 由方程(2-17),可求得C(s)為 因此,閉環(huán)系統(tǒng)的輸出量,顯然取決于閉環(huán)傳遞函數(shù)和輸入量的性質(zhì)。 擾動作用下的閉環(huán)系統(tǒng) 圖2-7為一個在擾動作用下的閉環(huán)系統(tǒng)。當(dāng)兩個輸入量(參考輸入量和擾動量)同時作用于線性系統(tǒng)時,可以對每一個輸入量單獨(dú)地進(jìn)行處理,將與每一個輸入量單獨(dú)作用時相應(yīng)的輸出量疊加,即可得到系統(tǒng)的總輸出量。每個輸入量加進(jìn)系統(tǒng)的形式,用相加點(diǎn)上的加號或減號來表示。 現(xiàn)在來討論圖2-7上表示的系統(tǒng)。在研究擾動量N(s)對系統(tǒng)的影響時,可以假設(shè)系統(tǒng)在開始時是靜止的,并且假設(shè)無誤差信號,這樣就可以單獨(dú)計算系統(tǒng)對擾動的響應(yīng)CN(s)。這一響應(yīng)可由下式求得:
另一方面,在研究系統(tǒng)對參考輸入量的響應(yīng)時,可以假設(shè)擾動量等于零。這時系統(tǒng)對參考輸入量R(s)的響應(yīng)CR(s)可由下式求得: 將上述兩個單獨(dú)的響應(yīng)相加,就可以得到參考輸入量和擾動量同時作用時的響應(yīng)。換句話說,參考輸入量R(s)和擾動量N(s)同時作用于系統(tǒng)時,系統(tǒng)的響應(yīng)C(s)為 另一方面,當(dāng)G1(s)G2(s)H(s)的增益增大時,閉環(huán)傳遞函數(shù)CR(s)/R(s)趨近于1/H(s)。這表明,當(dāng) >>1時,閉環(huán)傳遞函數(shù)CR(s)/R(s)將變成與G1(s)和G2(s)無關(guān),而只與H(s)成反比關(guān)系,因此G1(s)和G2(s)的變化,不影響閉環(huán)傳遞函數(shù)CR(s)/R(s)。這是閉環(huán)系統(tǒng)的另一個優(yōu)點(diǎn)。可以容易地看出:任何閉環(huán)系統(tǒng),當(dāng)反饋傳遞函數(shù)H(s)=1時,系統(tǒng)的輸入量與輸出量相等。 畫方塊圖的步驟 在繪制系統(tǒng)的方塊圖時,首先列寫描述每一個元件動態(tài)特性的方程式。然后假定初始條件等于零,對這些方程式進(jìn)行拉普拉斯變換,并將每一個拉普拉斯變換方程分別以方塊的形式表示出來。最后將這些方塊單元結(jié)合在一起,以組成完整的方塊圖。 方塊圖的簡化 應(yīng)當(dāng)強(qiáng)調(diào)指出,只有當(dāng)一個方塊的輸出量不受其后的方塊影響時,才能夠?qū)⑺鼈兇?lián)連接。如果在這些元件之間存在著負(fù)載效應(yīng),就必需將這些元件歸并為一個單一的方塊。
任意數(shù)量串聯(lián)的、表示無負(fù)載效應(yīng)元件的方塊,可以用一個單一的方塊代替,它的傳遞函數(shù),就等于各單獨(dú)傳遞函數(shù)的乘積。 一個包含著許多反饋回路的復(fù)雜的方塊圖,可以應(yīng)用方塊圖的代數(shù)法則,經(jīng)過逐步重新排列和整理而得到簡化。在表2-1中,列舉了一些比較常見的方塊圖代數(shù)法則。這些代數(shù)法則說明,同一個方程式可以用不同的方法表示。通過重新排列和代換,將方塊圖簡化后,可以使以后的數(shù)學(xué)分析工作很容易進(jìn)行。但是應(yīng)當(dāng)指出,當(dāng)方塊圖得到簡化后,新的方塊卻變得更加復(fù)雜了,因?yàn)楫a(chǎn)生了新的極點(diǎn)和零點(diǎn)。 在方塊圖簡化過程中,應(yīng)記住以下兩條原則: 1.前向通道中傳遞函數(shù)的乘積必須保持不變;
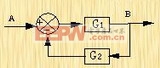
2.回路中傳遞函數(shù)的乘積必須保持不變。 方塊圖簡化的一般法則是移動分支點(diǎn)和相加點(diǎn),交換相加點(diǎn),減少內(nèi)反饋回路。下面舉例說明方塊圖的變換和化簡。 | 


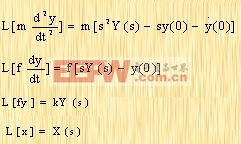


 式中,q為電荷量,C為電容。式(2-5)可改寫為
式中,q為電荷量,C為電容。式(2-5)可改寫為

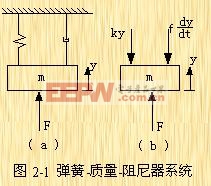
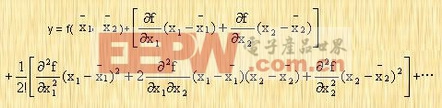
 很小,可以忽略x-
很小,可以忽略x-


























評論