基于RFID高速公路車輛測速定位方案


采用牛頓迭代法,設已得到第k 次近似解Xk,則可得:
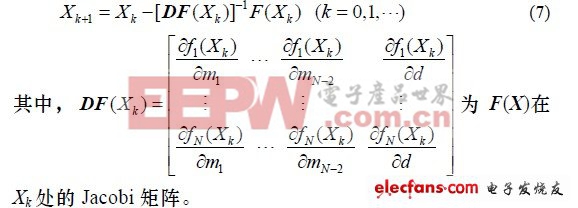
式(7)即為式(6)的牛頓迭代公式,采用Gauss-Jordan 方法求解Jacobi 矩陣DF(Xk)的逆,則可求得X,確定車輛的實時位置。再將結果代入式(5),即可得到車輛速度v.
4.2 初值設定
由于牛頓迭代法是局部收斂的,因此選定的初值要接近方程的解,否則有可能得不到收斂的結果。因此,合理地選取初值,不僅能確保求解過程不發散,而且還能減少迭代次數,進而減少算法運算量。
根據式(3)可知,相鄰射頻卡p、p+1 分別在車載閱讀器行駛方向的法線兩側。因此,可設:

依次可設:

此外,由圖2 還可知2dr + dl 》 d 》 dl 。
5 仿真實驗
仿真模型見圖2,設路肩寬度dl=2 m,車道寬度dr=5 m,每2 個射頻卡之間距離m=5 m,RFID 系統工作頻率f=915 MHz,閱讀器和射頻卡的最大通信距離R=14 m,采樣頻率fs=1 600 Hz,采樣點數N=128.考慮到高速公路環境較為空曠,忽略多徑干擾的影響,但由于閱讀器的接收信號十分微弱,因此干擾噪聲對其影響較大,設置信噪比SNB=-5 dB。
針對不同多普勒頻移隨機實驗500 次,其結果如表1 所示(限于篇幅,選取部分數據羅列)。可以看出,本文所采用的譜估計方法具有較高的估計精度,誤差在0.8 Hz 以下,且隨著fd 值不斷增大,誤差值呈減小的趨勢。
分別設定v 為30 km/h、60 km/h、90 km/h、120 km/h、150 km/h,針對不同位置對車輛速度進行反復測量,其平均誤差如表2 所示。當車輛接近靜止時,由于不存在多普勒頻移或多普勒頻移十分微小,由系統設定v=0.隨著車輛移動速度的提高,由于多普勒頻移在夾角一定的情況下同速度呈正比,因此速度誤差會隨著fd 測量誤差的減小略呈下降趨勢。
圖4 給出了400 次定位結果誤差分布。可以看到,節點位置誤差基本上在0.3 m 之內,平均誤差為0.1 m 左右。
表1 fd 估計值及誤差 Hz.






評論