基于RFID高速公路車輛測速定位方案

某一時刻,接收到來自射頻卡1,2,…,N 的信號。圖中v 表示車輛行駛速度, 1 2 , , , N θ θ ??θ 為車輛相對射頻卡1,2,…,N 的徑向方向與車輛行駛方向的夾角,m 為兩射頻卡間的距離,m1,m2,…,mN 為射頻卡1,2,…,N 同車輛行駛方向法線間的距離,d 為車輛到射頻卡垂直距離,dr 為車道寬度,dl 為路肩寬度, 1 2 d , d , , dN f f ?? f 為車輛相對射頻卡1,2,…,N 的多普勒頻移。
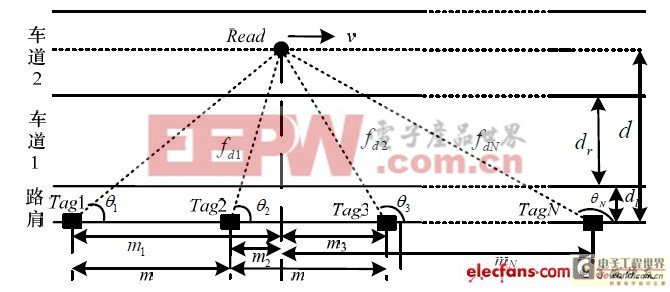
圖2 數學模型
根據幾何關系,可以得到:

同時,在RFID 系統中,射頻卡本身不發射電磁波,只對來自閱讀器的電磁波進行反射。因此,根據接收信號相對于發射信號的多普勒頻偏fd 關系,還可得到:
![]()
聯立式(1)、式(2),可以得到2N 個方程,而未知數個數為2N+2 個。實際上,當2 個射頻卡位于車輛行駛方向法線兩側時,其頻偏值必然為一正一負,因此,當檢測到2 個標識碼相鄰的射頻卡p 和射頻卡p+1、fdp 和fd(p+1)符號相反時,可知有:
![]()
此外,若設在閱讀器接收到第N 個射頻卡時開始執行定位算法,則可近似認為閱讀器與射頻卡N 之間的距離為最大通信距離R,有:
![]()
聯立式(1)、式(2),則可求得車輛行駛速度以及與N 個射頻卡的相對位置,進而實現對車輛當前位置的測定。在已知量中,m、R 是系統設定的,而N 個fd 值則需要進行實時估計。因此,對fd 估計的準確程度是實現精確定位的關鍵。
3 多普勒頻移fd 的估計
近年來,已有多種fd 估計算法被提出,如在時域中利用電平通過率進行直接測量[3]、或采用時頻分析方法[4]、或利用一些特殊性質如OFDM 導頻信號來估計最大多普勒頻移[5]。
這些方法要么測量精度過低,要么運算量過大,均不適合在RFID 系統中應用。本文結合RFID 系統特點,采用功率譜估計的方法,在頻域實現對fd 的估計。






評論