雙DSP柔性處理系統研究

雙DSP處理系統的柔性特色體現在:可依據實時環境需要加載不同的跟蹤算法來實現目標跟蹤。算法運行之初,兩片C6414-600都在FPGA的控制下,通過EMIFA口以EDMA方式,分若干次,依系統跟蹤算法而定將外部視頻緩存中的數據(一場圖像)依次讀入DSP的L2片內緩存中;算法運行之后,主從DSP則通過McBSP直接互接來實現雙DSP間的高速同步通以便交換數據處理結果。
系統設計中,Flash ROM選用AMD公司的AM29LV800(1M×8Bit)來把FLASH映射到DSP統一編址地址空間EMIFB口的CE1空間。當系統上電復位后,該地址空間為首先引導區域,這樣即可將應用程序代碼加載到片內高速執行,從而實現系統的脫機運行。
3.5 異步通信模塊
本系統與外部上位機的異步通信主要通過主DSP的McBSP。C6000的McBSP是一個功能非常強大的標準串口,支持全雙工串行通信,它的雙緩沖數據寄存器允許連續的數據流,可與多達128個通道進行收發通信。通過對McBSP的SPCR、RCR、XCR、SRGR、PCR寄存器的配置可實現系統通信時收發數據的幀同步和時鐘同步。
由于外部上位機的通訊機制是RS422標準,而DSP與外部通信只提供RS232接口,故應采用一片MAX3074芯片來實現RS422到RS232的轉換。MAX3074是MAXIM公司生產的一款專門用于RS422/485至RS232的轉接芯片,采用3.3V供電,這與C6000 DSP 外圍供電電壓一致,連接非常方便,不再需要多余的電壓適配器。另一方面,由于McBSP為同步串口,為了實現McBSP與RS232的無縫連接,可通過軟件加入發送擴展算法與接收壓縮算法,從而實現DSP與上位機異步串口通信協議的握手。
3.6 圖形顯示模塊
該模塊由圖形存儲器、圖形疊加電路和視頻監視器組成。圖形存儲器選擇IDT公司的70V08(64K×8Bits)DPRAM來存儲標識目標匹配位置的圖形數據。圖形疊加電路用于實現視頻與圖形的疊加,并最終由視頻監視器顯示疊加結果。
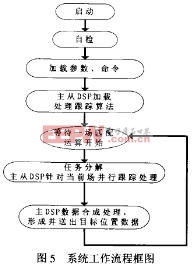
4 系統工作流程
本系統的軟件工作模式包括復位和初始化模式、運行模式、系統維護模式,可由系統程序來控制三種模式的切換。
在復位和初始化模式下,系統啟動后將由主從DSP同步實現程序搬移,把程序代碼搬移到片內并運行系統程序,從而初始化主從DSP的運行環境并設置相關參數。
運行模式下,雙DSP一方面獨立響應并處理FPGA中斷、運行核心跟蹤算法并實現子系統內的進程調度;另一方面通過主從DSP串口間的互連響應中斷以及主DSP串口與遠程主機的通訊等功能來實現雙DSP子系統間和雙DSP系統與外部主機的進程調度。
系統維護模式下,主從DSP在進行系統自檢后,可由遠程主機通過RS422接口與主DSP進行通訊,以實現程序的更新下載和參數修改等功能。圖5為系統軟件工作流程框圖。
5 結束語











評論