雙DSP柔性處理系統研究

1 引言
為了進一步提高現有機載光電跟蹤系統在實戰環境中,針對復雜場景下快速運動目標實施實時跟蹤的魯棒性與穩定性,筆者提出以雙DSP和FPGA為核心來構建主從式超高速并行處理體系的設計思想,并研究開發了基于雙DSP的新型柔性機載實時圖像跟蹤系統。一方面,采用雙DSP體系結構實現系統任務的并行劃分使本系統具備極高的運算處理速度;另一方面,現場可編程邏輯器件FPGA的引入使系統的靈活性也得到極大的提高。而將兩者結合可使本系統充分體現新一代機載實時圖像跟蹤系統更快速、更精確、更靈活的特點。
2 雙DSP高速信號處理系統特點
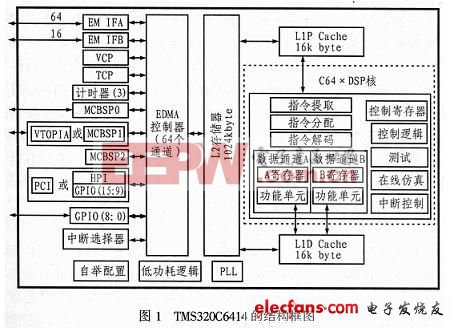
美國德州儀器公司(TI)推出的新一代數字信號處理器TMS320C6414(以下簡稱C6414)的主頻為400MHz~700MHz,其數據處理能力為3200MIPS~5760MIPS。該器件的結構框圖如圖1所示。其主要特點如下:
(1)DSP內核采用超長指令字(VLIW)體系結構,有8個功能單元、64個32bit通用寄存器,一個時鐘周期可同時執行8條指令,運算能力可以達到5760MIPS;
(2)為了使數據能滿足超高速DSP內核的需求,C6414采用了兩級超高速緩沖存儲器,即16k Byte的一級數據Cache、16k Byte的一級程序Cache和1024k Byte的數據和程序統一內存。
(3)增加了直接處理打包數據指令,可建立無縫的數據流,以提高指令集的效率;
(4)每個功能單元在硬件上都增加了附加功能,從而增強了指令集的正交性。
3 系統硬件設計

本光電成像跟蹤系統硬件平臺由六部分組成:圖像采集與預處理模塊、同步分離模塊、FPGA邏輯控制模塊、雙DSP+雙口RAM 圖像處理模塊、異步通信模塊和圖形顯示模塊。其系統原理框圖如2所示。從圖2可以知道:紅外探測器及可見光攝像儀輸出的模擬視頻信號經多路信號選擇芯片導入之后,經箝位、放大、濾波以及去同步頭等預處理后,一路經A/D轉換器將模擬視頻轉換為8bit數字信號并導入片外視頻緩存1、2,而后等待FPGA時序控制DSP外部中斷,以便將全部緩存數據搬移到DSP片內的2級緩存,再通過系統任務劃分實現數據重組,然后分別在主從DSP進行同步并行數據處理,并將中間結果由主DSP綜合,最后在完成后續運算后給出最終匹配結果。與此同時,主DSP則通過寫圖形顯示緩存將目標匹配位置信息傳遞到外界;另一路模擬信號先導入同步分離器,然后提取行場同步信號送交FPGA作為時基,以產生系統各級時序控制信號;第三路模擬信號送給圖形疊加電路作為輸入疊加信號之一,當場正程來到時,FPGA中斷控制并讀出圖形存儲器數據,同時在FPGA片內實現讀入數據的并/串轉換后移位輸出至圖形疊加電路,此時兩路信號將會合送入視頻監視器,從而完成視頻圖像上圖形的顯示。整個系統工作期間,每隔80ms主DSP還通過異步收發器與外部上位機進行串行通信,以便系統能夠實時接收外部命令與目標參數,進而調整跟蹤系統的工作狀態。











評論