基于FPGA技術的全方位移動機器人運動控制系統的方案設計

三輪全方位移動機器人與雙輪差速不同,具有很大的靈活性,況且由于3個全向輪的負載的不同,使得機器人不能走出精確的直線。而要實現機器人的精確控制,一個前提就是讓它能夠走出很直的直線。為檢驗機器人控制性能,設計了如下實驗:機器人以固定速度分別向前后左右4個方向行走,先觀察沒有加入PID控制算法時的情況,然后再觀察加入PID控制算法時的情況。實驗的結果如表1所示。
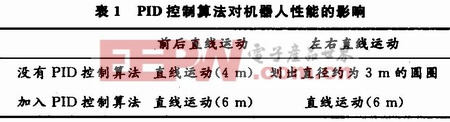
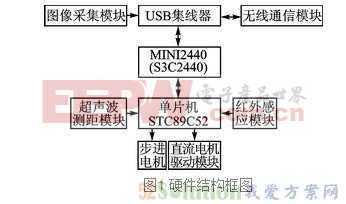
分析:由于機器人的3個全向輪所承受的負載不一樣,即在相同的占空比的PWM下,3個輪子的實際速度并不相同,這就使得三輪速度不可能準確合成機器人的速度,進而影響機器人的控制軌跡。根據圖1所示的機器人1號輪和3號輪負載相當,2號輪子承受的負載較大,沒有加入PID控制器時,前后運動雖然在一定范圍內近似直線,但是機器人運行的速度達不到預期設定的速度,左右運動軌跡就是一個圓,而且設定的機器人左右移動速度大小還決定了機器人是朝順時針方向還是逆時針方向轉圈。加入PID控制算法后,輪子的速度得到校正,機器人能夠以預期設定的速度前后左右運動,特別是左右運動在一定范圍內近似為直線,不再是圓圈。可見PID閉環控制算法明顯提高了機器人的控制性能。
5 結語
針對目前常見的以DSP為核心實現足球機器人底層運動控制系統的方案,提出了一種采用FPGA實現三輪全方位移動足球機器人的底層運動控制系統的方法。通過在三輪足球機器人上的應用實踐,發現這種采用FPGA實現的方案有很好的實時性,精確度較高,而且由于FPGA本身的引腳多特點,其可擴展性較強,比如可以通過串口配置數字羅盤等外圍信息傳感器等其他傳感器,同時,本設計對于研究多電機的機器人運動控制系統的實現方案有重要的參考價值和實用價值。
另外,由于全向輪的隨動性較強,且易打滑,在實行精確控制的時候方向容易受到影響,而且PID閉環控制算法反應時間較長,參數還需要更多時間的調試,在以后的研究中,我們將研究更為精確的控制算法,實現對機器人的精確控制。

pid控制相關文章:pid控制原理
fpga相關文章:fpga是什么
伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理



評論