基于FPGA技術(shù)的全方位移動機(jī)器人運動控制系統(tǒng)的方案設(shè)計

這種算法雖然比較直觀,但由于是全量輸出,所以每次輸出均與過去的所有狀態(tài)有關(guān),計算時要對e(k)進(jìn)行累加,計算機(jī)運算量大。
于是產(chǎn)生了增量式PID算法:

上述公式(7)為增量式PID控制算法。只輸出控制增量,誤動作影響較小,且控制增量只與最近幾次的采樣值有關(guān),容易通過加權(quán)處理獲得比較好的控制效果。
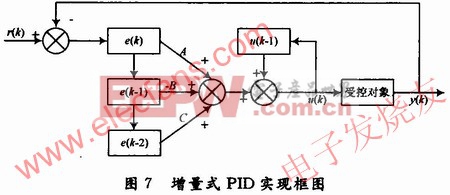
根據(jù)以上公式推導(dǎo),結(jié)合FPGA的工作特點,本文設(shè)計了適合FPGA的增量式PID實現(xiàn)結(jié)構(gòu)。
由圖7可以看出,增量式PID控制算法程序結(jié)構(gòu),只要最近的3個誤差采樣值就可以加權(quán)計算。這在FPGA內(nèi)部完全可以并行實現(xiàn),移位部分結(jié)構(gòu)類似FIR濾波器的實現(xiàn)結(jié)構(gòu),難點是FPGA設(shè)計時對有符號數(shù)的熟練操作和保證累加器不能溢出。
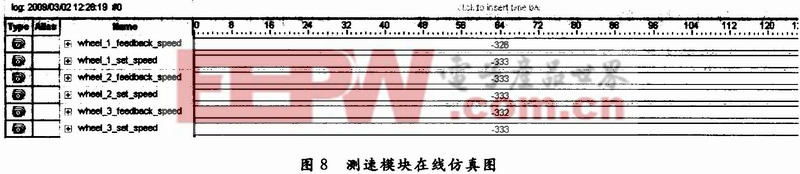
一種高效的硬件測試手段和系統(tǒng)測試方法,它能夠獲取并顯示可編程片上系統(tǒng)(SOPC)的實時信號,它可以隨設(shè)計文件一起下載到FPGA中,用于捕捉FPGA內(nèi)部節(jié)點和I/0引腳的狀態(tài),就如同使用真的邏輯分析儀一樣,對設(shè)計進(jìn)行在線仿真,但又不影響硬件系統(tǒng)的工作。為了檢驗測得的全向輪實際速度值是否準(zhǔn)確,對設(shè)計的測速模塊進(jìn)行了在線仿真。設(shè)定每個全向輪以固定的速度轉(zhuǎn)動,對比測得的實際速度值和設(shè)定的速度值,如圖8所示。

pid控制相關(guān)文章:pid控制原理
fpga相關(guān)文章:fpga是什么
伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理
pid控制器相關(guān)文章:pid控制器原理



評論