基于FPGA技術(shù)的全方位移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的方案設(shè)計(jì)

0 引言
目前,全方位移動(dòng)機(jī)器人由于具有出色的靈活性,已經(jīng)成為RoboCup中型組足球機(jī)器人比賽中最理想的選擇。而機(jī)器人的運(yùn)動(dòng)控制一直以來(lái)都是直接影響機(jī)器人性能的主要因素,也是移動(dòng)機(jī)器人研究的熱點(diǎn)之一。本文研究了一種用FPGA技術(shù)實(shí)現(xiàn)三輪全方位移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的方法,與雙DSP結(jié)構(gòu),DSP+CPLD結(jié)構(gòu),以及DSP+專用集成電路結(jié)構(gòu)等相比,該方法具有簡(jiǎn)單可靠,擴(kuò)展性強(qiáng)等特點(diǎn)。且FPGA設(shè)計(jì)簡(jiǎn)單,使用方便,開發(fā)周期短,能夠?qū)崿F(xiàn)真正的SOPC系統(tǒng)。
1 全方位移動(dòng)機(jī)器人運(yùn)動(dòng)模型
設(shè)世界坐標(biāo)系下機(jī)器人的速度為ε=[vx,vy,φ],則當(dāng)vx=O,vy≠0,φ=O時(shí),機(jī)器人做前后方向的直線運(yùn)動(dòng),當(dāng)vx≠0,vy=0,φ=0時(shí),機(jī)器人做左右方向的直線運(yùn)動(dòng),當(dāng)vx=0,vy=0,φ≠0時(shí),機(jī)器人做自轉(zhuǎn)運(yùn)動(dòng)。圖1中,ω1,ω2,ω3為3個(gè)主動(dòng)輪的轉(zhuǎn)動(dòng)角速度,R為全向輪半徑;L1,L2,L3為機(jī)器人車體中心到3組全向輪中心的水平距離,設(shè)有L1=L2=L3=L。α為前兩輪之間的夾角,另外2個(gè)夾角均為180°-α/2。則機(jī)器人坐標(biāo)系下的速度到三輪速度之間的關(guān)系如下:
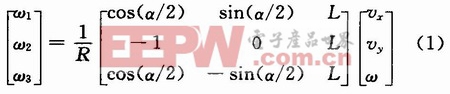

由式(1)可以看到:知道了機(jī)器人在平面世界坐標(biāo)系中的速度要求后,便可以得到主動(dòng)輪的速度要求,進(jìn)而對(duì)電機(jī)發(fā)出相應(yīng)的控制信號(hào)。
2運(yùn)動(dòng)控制方案本系統(tǒng)總體設(shè)計(jì)思路如圖2所示,首先通過(guò)RS 232接口,實(shí)現(xiàn)PC機(jī)與底層控制芯片F(xiàn)PGA的通信,F(xiàn)PGA在接收到相關(guān)的機(jī)器人坐標(biāo)系下的速度后,將機(jī)器人坐標(biāo)系下的速度值轉(zhuǎn)化成機(jī)器人3個(gè)全向輪子的角速度,將得到的角速度值計(jì)算出相應(yīng)的占空比,生成相應(yīng)占空比的PWM波形,輸出信號(hào)接到直流伺服電機(jī)驅(qū)動(dòng)器,然后通過(guò)FPGA采集正交編碼盤信號(hào),計(jì)算出輪子實(shí)際的角速度值,做PID速度閉環(huán)控制。鑒于FPGA模塊復(fù)制的優(yōu)勢(shì),這里對(duì)每個(gè)全向輪分別做了PID閉環(huán)控制。
3 系統(tǒng)硬件設(shè)計(jì)
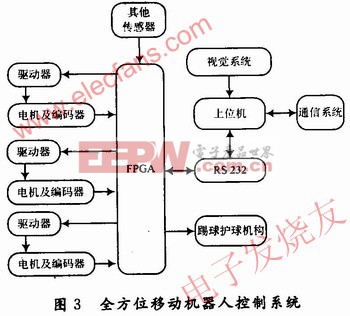
采用的三輪全方位移動(dòng)機(jī)器人系統(tǒng)框圖如圖3所示,上位機(jī)主要完成圖像信息的采集、處理、路徑規(guī)劃,并實(shí)現(xiàn)與場(chǎng)外裁判盒的通信。下位機(jī)主要是FPGA,主要實(shí)現(xiàn)三輪編碼信號(hào)的采集,PID速度閉環(huán)控制,踢球控制,電機(jī)控制信號(hào)的產(chǎn)生,還有其他的傳感器信息的采集等,并負(fù)責(zé)與上位機(jī)之間的信息交互。本設(shè)計(jì)只是完成了下位機(jī)運(yùn)動(dòng)控制部分。
3.1 正交編碼信號(hào)采集與測(cè)速實(shí)現(xiàn)
增量式光

pid控制相關(guān)文章:pid控制原理
fpga相關(guān)文章:fpga是什么
伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理
pid控制器相關(guān)文章:pid控制器原理



評(píng)論