雙天線GPS/SINS組合導(dǎo)航系統(tǒng)設(shè)計
——

編者按:本系統(tǒng)作為淺組合導(dǎo)航系統(tǒng)的一種,利用了雙天線定向GPS與光纖陀螺的組合,以基于DSP+FPGA多處理器結(jié)構(gòu)作為導(dǎo)航計算機平臺,在原有的位置與速度基礎(chǔ)上加入了姿態(tài)作為第三個量測量,應(yīng)用卡爾曼濾波算法將GPS姿態(tài)信息作為對慣性導(dǎo)航系統(tǒng)數(shù)據(jù)的初始值和修正。設(shè)計的系統(tǒng)通過跑車實驗驗證后表明達(dá)到了設(shè)計要求,具有實時性好,運算精度高等優(yōu)點。
其中F(t)是18*18階的狀態(tài)轉(zhuǎn)移矩陣;W(t)為18維的狀態(tài)噪聲向量;下列各式給出了狀態(tài)方程的系統(tǒng)噪聲性質(zhì):
本文引用地址:http://www.104case.com/article/203227.htm??????? 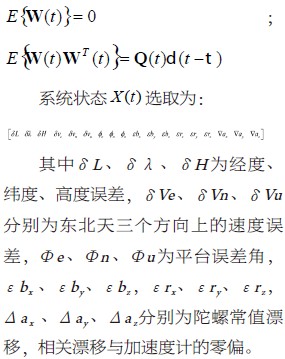
而其中失準(zhǔn)角誤差方程為:
??????? 
(2)組合導(dǎo)航系統(tǒng)的量測方程
由于系統(tǒng)將定向GPS給出的數(shù)據(jù)作為修正數(shù)據(jù),系統(tǒng)量測值在位置和速度值的基礎(chǔ)上加入了姿態(tài)信息。位置量測值為慣導(dǎo)系統(tǒng)與GPS給出的緯度、經(jīng)度和高度差,相應(yīng)的速度量測值為慣導(dǎo)系統(tǒng)與GPS給出的在慣性系統(tǒng)中各坐標(biāo)下的差值,而慣導(dǎo)系統(tǒng)與雙天線GPS給出的姿態(tài)差值作為第三組量測值。
慣導(dǎo)系統(tǒng)與GPS位置量測信息在地理坐標(biāo)系以真值和誤差表示如下[4]:
??????? 
與位置量測方程形式相似,速度量測方程表示如下:
??????? 













評論