雙天線GPS/SINS組合導航系統設計

引言
本文引用地址:http://www.104case.com/article/203227.htm現代導航對系統有能夠實時、準確地獲取載體運動信息的要求。在組合導航領域,衛星導航(目前最常用的是GPS)與捷聯式慣性導航(SINS)組合的導航系統能夠彌補各自單獨導航情況下的不足,而且具有高精度、低成本、結構簡單等優點,目前已經成為最熱門的研究方向。GPS/SINS組合導航一般是以位置,速度作為量測量來修正慣性導航系統,隨著GPS定向系統的逐漸發展,將姿態與位置和速度同樣作為量測量的全組合方法正在成為研究熱點[1]。本文根據GPS/SINS全組合導航系統的機理和特點在基于DSP+FPGA的導航計算機平臺上設計了可靠的信息融合技術,通過相關的試驗證明本系統具有較好的效果。
組合導航系統軟硬件設計
導航計算機總體設計
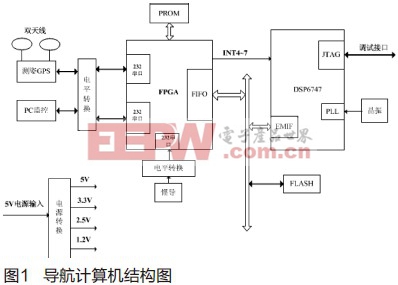
捷聯式慣性導航系統中將陀螺儀、加速度計、電子線路和金屬臺體合稱為慣性測量裝置(IMU),它是整個系統的核心部件。本文中導航系統采用方便野外跑車實驗的一體化、模塊化設計,通過接口將導航計算機固連于IMU器件內,計算機與IMU方便更換。本系統中設置IMU數據更新率為200Hz,GPS數據輸出頻率為1Hz,因此計算機必須能夠在5ms內完成整個系統算法運行,這樣的速率要求使得單純采用一個核心處理器的方法已無法滿足系統實時性要求,故本系統中計算機采用了DSP+FPGA雙核設計方式,DSP選用TI公司的TMS320C6747,TMS320C6747具有高性能的浮點運算能力,最高主頻可達到450MHz,能夠實現高速運算;而FPGA型號為Xilinx公司的XC3S500E。系統硬件結構如圖1所示,其中,DSP6747主要負責IMU解算、卡爾曼濾波等數據處理算法,FPGA主要完成外部接口擴展(2路RS232口,1路RS422口)、數據的采集與傳輸及邏輯時序控制的功能。
導航系統軟件設計
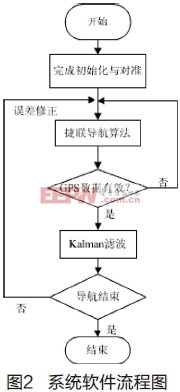
導航計算機軟件設計必須滿足實時性與準確性的要求。計算機上電后會執行整個系統的初始化,通過后開始捷聯慣導算法運算,組合導航算法在GPS數據獲取后將其作為初始數據進行運算,如果有GPS數據丟失狀況發生,系統將單獨運行捷聯慣導解算,經解算后的數據被送入Kalman濾波器中處理。系統軟件流程圖如圖2所示。
組合導航系統算法
(1)組合導航的狀態方程
目前,GPS/SINS組合導航方式主要分為松散組合和緊密組合。而松散組合大多采用位置、速度組合模式,而本文中加入雙天線GPS姿態角作為量測量進而實現全組合方式。其狀態方程如公式(1)所示:
??????? ![]()













評論