自動駕駛汽車,已經準備好迎接道路挑戰了嗎?

我參加了今年在拉斯維加斯舉行的消費電子展會(CES),并設法乘上了在封閉道路上以12.5mph速度行駛的Inducts公司無人駕駛汽車Navia。整個過程給我的感覺非常安全。但我還是不能肯定放心將作為司機特有的控制權交給軟件、激光雷達和攝像機。
本文引用地址:http://www.104case.com/article/201808/388099.htm商用飛機在飛行過程中使用自動駕駛、自動接近與著陸軟件已經有很長時間了,但它們不必處理道路中突然出現的行人,或者在后車中忙著操作短信而沒有觀察到前面車速減慢然后快速撞向你后保險杠的人。

Inducts公司的無人駕駛汽車Navia
令人高興的是,業界正在軟件和電子控制功能方面做許多開發工作,這些軟件和電子控制功能有望進一步完善自動駕駛汽車的安全性和最終實現。下面讓我們了解其中一些技術的進展。
滑鐵盧大學
Steven Waslander和Nuvation在自動駕駛汽車方面組成了一個很好的團隊,他們發表的論文和開發的測試跟蹤平臺證明理論方案是令人滿意的。Nuvation公司的首席執行官Mike Worry是滑鐵盧大學電子工程專業畢業的研究生,他與滑鐵盧大學簽署了一個為期4年的研究協議,目標是為自動駕駛汽車研發新產品。
自動駕駛汽車輪胎動力性能的重要性
自動駕駛汽車的動力性能對乘客、行人和道路上其它汽車的安全性來說至關重要。這些動力性能供自動駕駛汽車中的控制器使用,需要得到很好的理解并經過嚴格的測試,才能證明自動駕駛汽車的安全性。最近的一些控制器設計正在嘗試操作汽車使其接近輪胎摩擦極限,以便最大限度地提高汽車性能。
輪胎/道路摩擦力和它們的相互作用在自動駕駛汽車動力性能方面起著重要的作用。滑動圓圈(Slip Circle)(圖1)顯示了輪胎產生的最大力。
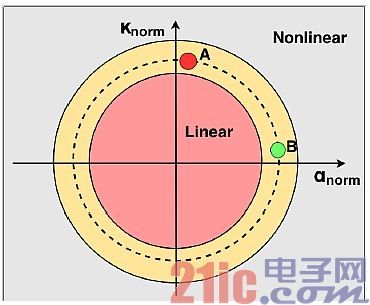
圖1:滑動圓圈中的水平軸作為歸一化的側滑角度,垂直軸作為歸一化的縱向滑動比。A點是一個高滑動比和低滑動角度的點,代表汽車加速時的情形。B點是一個低滑動比和高滑動角度的點,代表汽車猛打方向時的情形。虛線代表汽車正以摩擦極限值行駛。(摘自參考文獻1)
研究小組嘗試估計滑動圓圈的參數,因為滑動角度和縱向滑動可以預測汽車的動力性能。他們發現,可以通過精確的GPS和慣性測量單元(這是由最近被飛兆公司收購的Xsens公司定義的)的測量值計算滑動角度。問題是這種方法對噪聲非常敏感,現有商用汽車上的低成本傳感器無法很好地支持。這些問題提醒研究人員考慮估計/觀測器算法,見圖2。
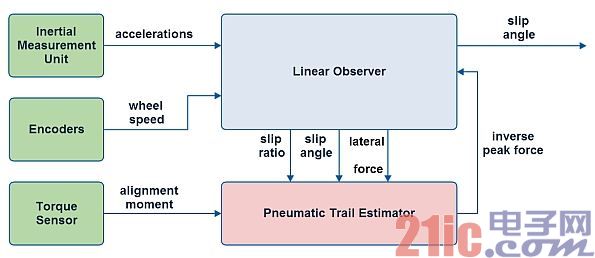
圖2:帶輪胎拖距估計器的觀測器框圖(Nuvation供稿)。
擴展卡爾曼濾波器(EKF)開發用于估計輪胎在路面上產生的滑動角度和縱向滑移。事實表明,EKF只能在線性輪胎區精確工作,在非線性區不能精確工作。
粒子濾波器(PF)可以對滑動角度作出較為精確的估計,代價是運算強度較高,無法做到實時估計。
試用無跡卡爾曼濾波器(UKF)表明,雖然它們可以得到好的結果,但這種方法也是基于商用汽車中不常見到的傳感器。
最近的研究認為,使用輪胎拖距也許是用于估計輪胎/道路摩擦系數和橫向輪胎力的更好選擇。然而,這種方法也有優缺點。這種方法似乎可以很好地估計摩擦系數和橫向輪胎力,線性觀測器也能精確地跟蹤線性和非線性區的側滑角度。而且這種方法較少依靠模型和輪胎參數的精度,計算也簡單,可以使用目前在大多數商用汽車上安裝的傳感器。這種方法的缺點是,它有一些前提條件,包括后輪驅動汽車,可忽略的縱向車輪動力(加速和剎車)(這將限制精確地跟蹤接近滑動圓圈水平軸區域的滑動角度)。
參考文獻1中的文章使用了基于輪胎拖距的觀測器設計,其中增加了縱向輪胎動力性能,因此可以在整個滑動圓圈域中得到精確的滑動角度估計值。Dugoff輪胎模型用于計算輪胎/道路力,因為它比大多數其它模型更精確,使用更少的參數,對精確的輪胎參數依賴性也更低。
這篇文章和所用方法的結論是,這種設計的反應速度快,不需要昂貴的傳感器。這種方法已被證明在性能上超過其它常見的觀測器設計。目前這種模型只使用單軌自行車模型,但以后可以修改為更精確的四輪汽車模型,從而估計出其它汽車動力性能。
這是接受自動駕駛汽車上路的良好起點,但在放心地將方向盤、油門和剎車交給任何完全自動駕駛系統之前還有很長的路要走。
自適應巡航控制和追尾碰撞避免
這些是可以并且正在被應用于未來全自動駕駛上路汽車的功能。除了汽車四周的盲點后視鏡和安全攝像機外,任何可以得到的輔助功能都將更好地幫助分心和粗心的司機減少事故。
許多汽車已經在使用自適應巡航控制(ACC)功能來提高安全性和舒適性。現在我們正在期待利用汽車到高速公路通信技術幫助提高交通效率,就像加州那樣,最終發展成車到車通信。為了達到這個目的,我們需要實現合作性自適應巡航控制(CACC)。這將在汽車之間引入無線通信技術,實現更近的汽車安全距離和更少的“幽靈式交通擁堵”。這種現象是“人類”司機在交通高峰期彼此跟車太近、即使有一輛車輕踩剎車、后車司機都會接連反應從而將此事件放大而發生的。這種現象也被稱為車流不穩定性。CACC可以用來徹底消除這種現象。
GCDC(Grand Cooperative Driving Challenge)組織聲稱,GCDC團隊成員間彼此競爭相當激烈,都旨在設計和實現最高效的合作型汽車系統。這種系統能夠在各種合作性場景中執行先進的操作。為了達到這個目的,汽車之間必須通過無線通信交換有關它們方位和意圖的信息,如圖3所示。

圖3:GCDC挑戰組織支持針對實際高速道路上的協同駕駛進行創新性技術的開發。(照片由GCDC提供)
下面是GCDC對作為終極駕駛模式的自動駕駛汽車的評論:
鑒于擁堵、交通安全和排放問題,道路交通將繼續面臨嚴重的挑戰。合作型和自動駕駛系統在某種程度上可以讓司機從駕駛工作中解放出來,可能為其中一些問題提供解決方案。
目前市場上存在不同程度的自動駕駛系統,而在所有交通條件下能夠完全自動駕駛的汽車離現在還很遙遠,不過先進駕駛輔助系統(ADAS)已經進入市場。自適應巡航控制和車道保持輔助系統就是明證。
協同駕駛的關鍵是通信。信息交換可以實現汽車之間、汽車和路邊系統之間的合作。比如了解有關事故和危險等即將出現的交通情況的早期告警,可以實現更加高效和安全的交通流量。
在2011年的GCDC中,汽車的CACC使用帶前饋元件的線性反饋控制器,如圖4所示。
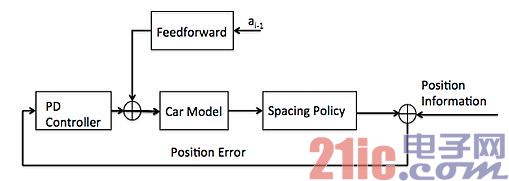
圖4:使用帶前饋元件的線性反饋控制器的反饋控制模型(搞自參考文獻3)
比例微分(PD)控制器
PD(Proportional Derivative)的增益通過實驗選取,前饋控制器設計用于提高高速道路上的車流穩定性。這里使用了簡化的汽車模型,其參數對反饋控制器幾乎沒有影響。這里的關鍵目標是使用能夠完全自適應汽車模型中變化的控制器,以便能夠在實際道路駕駛條件下使用。
現有的比例微分控制方法無法包含由本文較早前所說的側向控制器和滑動圓圈引起的限制。如果我們想要得到適應真實高速公路和普通公路的可行工作系統,這些問題都需要解決。
這里的動態模型使用了源自參考文獻4的模型預測控制(MPC)技術。假設汽車有2個激光雷達,一個位于車前部,一個位于車后部。所提出的控制模型如圖5所示。
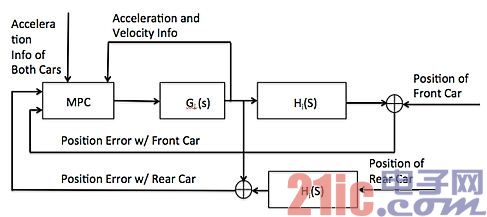
圖5:所提出的控制模型(摘自參考文獻3)。
這種模型使得,當后方車輛離得很遠時,誤差不會累積。每輛汽車都裝備有無線數據接收器,用于同時接收前方和后方車輛的加速信息,見圖6。
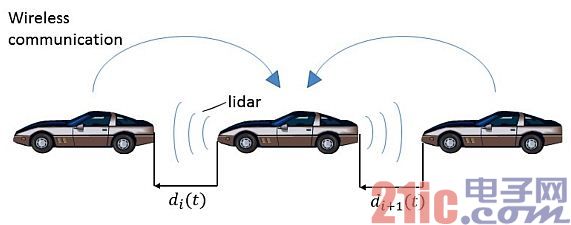
圖6:每輛車都安裝有無線數據接收器,可以同時接收前方和后方車輛的加速信息。
參考文獻3寫道:
開關依據的是

。如果

小于10米,那么隨后就是6個狀態的跟隨式MPC模型,并使用追尾碰撞檢測。否則就使用由Kianfar et al開發的狀態MPC,并且只使用前方車輛碰撞檢測。這樣能夠確保我們的控制器在大多數情況下都與大部分其它MPC控制器一樣工作,并且在關鍵時候會更出色。
其中
和
是車輛之間的距離誤差。這種誤差在理想情況下應該是零。這兩個誤差都設置有最小約束條件,并且保持用MPC檢查車輛之間的速度和速度誤差。為了確保系統呈現出車流穩定狀態,當加速度是正值時,我們需要使汽車的加速度總是小于前方車輛的加速度。如果加速度是負值,車子的加速度就變成更低的限值(前方汽車存在速度誤差的上限和下限值,但后方汽車只有更低的限值)。
參考文獻3中提到的這個團隊在Nuvation的協助下已經建立了一個平臺,可以用來在測試軌道上運行的1/5大小的遠程控制電動汽車模型上測試所有CACC算法。

圖7:位于測試軌道上的1/5尺寸的遙控電動汽車模型。這些汽車可以達到120km/h的速度(Nuvation提供)。
本文小結
今天的汽車上已經有巡航控制功能控制著油門踏板。一些汽車擁有車道偏離避免和安全攝像機。我們將向采用CACC的未來自動駕駛汽車邁出第一步,這將導致追尾碰撞避免功能的追加和更平順、更安全的交通流量。
在華爾街日報的一篇文章中,日產汽車公司透露在2020年之前將發布多種自動駕駛的功能。日產的首席執行官Carlos Ghosn表示,目前有4種社會經濟趨勢與自動駕駛(Autonomous Drive)汽車有關——全球巨型城市的出現、對聯網要求的增長、人口老化以及市場中婦女的影響力和購買力的增長。
日產的下一步計劃是:
交通擁堵導航。到2016年年底,日產將提供可以在擁堵的高速道路上自動駕駛并且安全的汽車。
完全自動化的停車系統。同樣到2016年底之前,日產將在更大范圍的汽車上安裝完全自動化的停車系統。
多車道控制。到2018年,日產計劃提供能夠自動判斷危險并改變車道的汽車。
交叉路口的自動駕駛。到2020年,日產將推出交叉路口自動駕駛功能,無需司機干預汽車就能安全通過城市交叉道路。
Ghosn對日產的自動駕駛(Autonomous Drive)技術和無人駕駛汽車(self-driving cars)作了區分。
“我想要澄清一下,日產引領的自動駕駛(Autonomous Drive)技術和無人駕駛汽車(self-driving cars)之間有很大的差別。自動駕駛是要釋放或減輕司機的日常任務,特別是在擁堵或長距離行車條件下。司機仍然可以控制汽車,但這時的汽車能夠自動做更多的事情。”Ghosn表示,“相較而言不要求任何人工干預的無人駕駛距離實際商用還有很長的距離。目前它們只適合嚴格控制的道路環境,要求速度低,而且面臨著法規雷區。”









評論