無(wú)速度傳感器矢量控制變頻系統(tǒng)研究

可以得到轉(zhuǎn)速估算模型。本模型中電機(jī)參數(shù)值也至關(guān)重要,否則容易出現(xiàn)穩(wěn)態(tài)誤差。模型方程式為
估算模型框圖如圖3所示。
2 系統(tǒng)組成及設(shè)計(jì)
控制系統(tǒng)由主電路、控制電路和輔助電路構(gòu)成。
主電路中逆變器采用6管封裝的IGBT 功率模塊,完成功率變換。控制電路以TMS320F2407 芯片為核心,用來(lái)完成矢量控制核心算法、PWM 產(chǎn)生、相關(guān)電流的檢測(cè)處理等功能。輔助電路由輔助開(kāi)關(guān)電源,驅(qū)動(dòng)電路,電流傳感器組成,開(kāi)關(guān)電源給系統(tǒng)提供多路隔離電源。
2.1 系統(tǒng)主回路
系統(tǒng)主回路包含整流器、逆變器、輔助電源、光耦隔離等。整流電路采用單相橋式電力二極管,把交流電整流成脈動(dòng)直流電,并用大電解電容濾波儲(chǔ)能。
逆變部分采用智能功率模塊(Intelligent PowerModule,IPM),由于IPM內(nèi)置保護(hù)電路和相關(guān)的驅(qū)動(dòng)電路,縮短了系統(tǒng)的設(shè)計(jì)周期,也減小了系統(tǒng)的體積,提高了系統(tǒng)的可靠性。

2.2 DSP 2407控制板
控制板除了能夠完成空間電壓矢量調(diào)制算法外,還應(yīng)當(dāng)具有一個(gè)調(diào)速系統(tǒng)所必需的其它功能。控制板的設(shè)計(jì)主要包括DSP 基本外圍電路的設(shè)計(jì)、采樣電路的設(shè)計(jì)、保護(hù)電路的設(shè)計(jì)、通信電路的設(shè)計(jì)和輸入/輸出I/O口設(shè)計(jì)。通用變頻控制需要檢測(cè)的量有直流母線電壓、三相相電流、散熱器溫度等。
3 實(shí)驗(yàn)結(jié)果
3.1 實(shí)驗(yàn)結(jié)果
本文針對(duì)上述的控制方案進(jìn)行了實(shí)驗(yàn)研究。
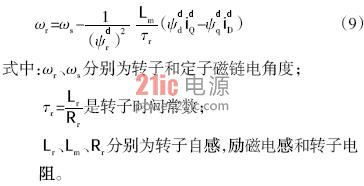
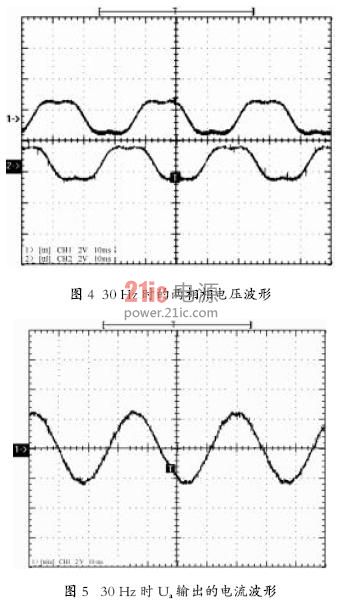
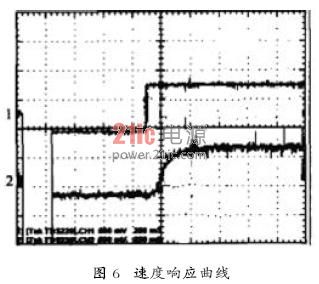
SVPWM的開(kāi)關(guān)頻率為10 kHz,軟件死區(qū)為4μs,電流環(huán)的采樣周期為100 μs,電流環(huán)的輸出限幅為額定電壓的1.25倍。電機(jī)為2 對(duì)極三相籠型異步電機(jī),直流側(cè)電源是通過(guò)整流橋?qū)蜗嘟涣麟娬鳌V波產(chǎn)生的。電機(jī)額定參數(shù)為:PN= 0.6 kW ;UN=380 V;IN=1.6 A;fn=50 Hz;nN=1 400 r/min。系統(tǒng)實(shí)驗(yàn)波形如圖4—圖6所示。
實(shí)驗(yàn)結(jié)果表明響應(yīng)有很好的動(dòng)態(tài)特性和穩(wěn)態(tài)精度,表明了控制方案的優(yōu)良性能,但是由于電機(jī)參數(shù)問(wèn)題,估計(jì)的轉(zhuǎn)速曲線稍微有點(diǎn)波動(dòng),和給定轉(zhuǎn)速相比有些誤差。
3.2 誤差分析
1)無(wú)論是轉(zhuǎn)子磁鏈位置估計(jì)還是速度估計(jì),對(duì)參數(shù)的依賴(lài)性都較強(qiáng),也正是因?yàn)槿绱耍瑹o(wú)速度傳感器控制系統(tǒng)對(duì)電機(jī)參數(shù)的變化更為敏感,在速度調(diào)節(jié)與轉(zhuǎn)矩響應(yīng)等動(dòng)態(tài)指標(biāo)上會(huì)出現(xiàn)跟蹤誤差。
2)由于轉(zhuǎn)子時(shí)間常數(shù)變化、磁飽和、渦流等影響,要實(shí)現(xiàn)異步電機(jī)轉(zhuǎn)子磁場(chǎng)準(zhǔn)確定向難度很大。另外,在數(shù)字控制中,存在計(jì)算精度、離散化和時(shí)間滯后問(wèn)題,這些也會(huì)導(dǎo)致磁鏈觀測(cè)角度的誤差。
4 結(jié)語(yǔ)
從異步電機(jī)矢量控制的基本方程式出發(fā),并根據(jù)基本方程構(gòu)建了一個(gè)無(wú)速度傳感器矢量控制系統(tǒng)。詳細(xì)介紹了轉(zhuǎn)子磁鏈估算模型和轉(zhuǎn)速估算模型,并由上述結(jié)果可得出以下結(jié)論:
1)本文所設(shè)計(jì)的矢量控制系統(tǒng),充分利用了DSP的高速運(yùn)算能力和豐富的內(nèi)外設(shè)資源,使系統(tǒng)外圍電路少,結(jié)構(gòu)緊、可靠性高;
2)實(shí)驗(yàn)表明,系統(tǒng)控制精度高、實(shí)時(shí)性好、動(dòng)態(tài)響應(yīng)快。












評(píng)論