基于DSP TMS320LF2406的通用變頻器的研發

0 引言
本文引用地址:http://www.104case.com/article/201808/387553.htm變頻器控制電機最基本的兩個輸出量是頻率和轉矩,通用變頻器由于其通用性而被廣泛地應用于各種場合。為滿足各種負載的要求,在通用變頻器中設計了靈活而豐富的頻率設定功能和頻率控制接口,為此通用變頻器中有上千條的功能指令參數,外部擁有基本的控制端子和可編程的控制端子。根據負載機械的具體要求,可選擇多種啟動和停機方式、頻率上下限設定、多段速運行設定等。頻率輸出值可用數字鍵盤設定,或利用輸入模擬控制端子來控制電機的速度。變頻器所具有的完善的保護功能,可使電機與變頻器同時獲得多種可靠的保護。
1 系統的基本結構
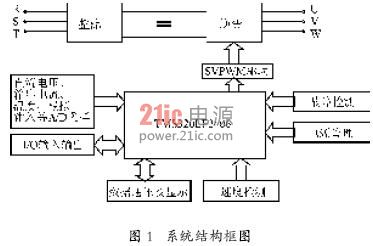
變頻器系統硬件電路一般可以分成三部分,功率主電路部分、控制電路部分以及檢測與驅動電路。本文軟件所用平臺為通用變頻器的典型交—直—交電壓源型主電路結構形式,控制部分采用DSP 芯片TMS320LF2406,系統結構框圖如圖1所示。
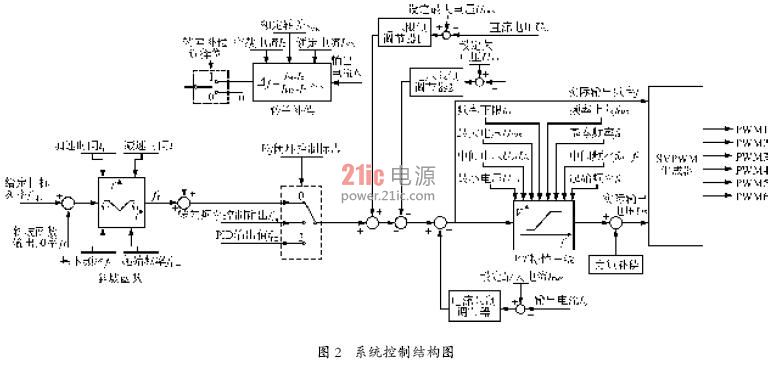
控制系統主要功能包括對直流電壓、輸出電流、溫度、模擬輸入等的A/D采樣,I/O輸入輸出,數據通訊及顯示,速度檢測,故障檢測及電源管理等。本系統采用的是開環V/f控制,其系統控制圖如圖2所示。
該系統采用電壓空間矢量調制技術實現變壓變頻控制方式,可以由開環給定一個頻率值或者由系統中的某一參數和其反饋值經過PI調節得到系統的輸出頻率,通過V/f 曲線得到一個電壓值,再由SVPWM波形發生器產生SVPWM觸發脈沖,這樣就可以通過改變功率器件IGBT 的占空比實現對輸出電壓的控制,而通過控制逆變橋的工作周期來控制輸出頻率。
在整個控制系統中,主要包括頻率斜坡函數發生器、V/f函數發生器、電流限制調節器、電壓限制調節器、轉差補償、力矩補償、PI調節等控制環節。圖2中的控制部分主要由數字化來實現,控制核心由DSP(數字化信號處理器)完成,其時鐘頻率為40 MHz。
2 系統的軟件設計
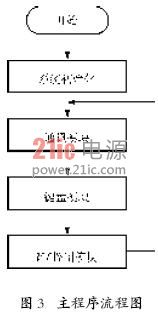
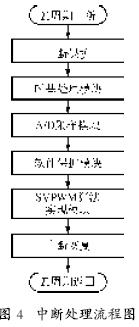
按控制系統軟件在DSP中的功能作用,可分為初始化模塊和執行模塊兩大部分。初始化模塊的目的是建立起DSP應用環境;執行模塊的目的是實現變頻器的控制功能,它又分為主循環模塊、中斷服務程序模塊。主循環模塊又稱等待循環程序模塊,主要執行一些實時性要求不高的閑時功能模塊,例如通訊模塊、鍵盤模塊和V/f控制模塊;中斷服務程序模塊主要執行一些實時性要求高的功能模塊,如SVPWM算法實現輸出模塊、A/D采樣模塊、時基模塊和軟件保護模塊。圖3和圖4分別給出系統的主程序流程圖和中斷程序流程圖。
3 主要功能程序實現
3.1 頻率變化輸出的加減速實現
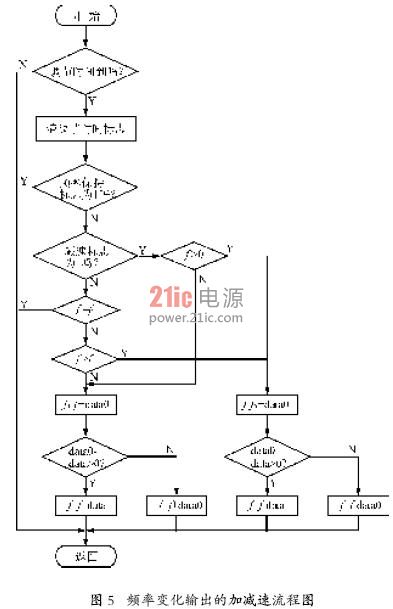
電動機在啟動和停機過程中,或者是在負載不斷變化的過程中,變頻器會得到一個階躍頻率給定值,這樣將對系統產生過大的沖擊,頻率斜坡函數發生器的作用就是把階躍信號值轉變為斜坡信號值,使系統的電壓、電流、頻率和電機轉速都能穩定地上升和下降。斜率的大小由頻率加減速時間決定,本系統有4種可供選擇的加減速時間,可以通過鍵盤或控制端子的不同組合來確定,時間能夠精確到0.01 s,調頻的分辨率達到0.01 Hz,這主要是通過優化的異步信號調制技術和DSP的高速處理能力來實現的。頻率斜坡函數的軟件實現如圖5所示,在此過程中,為了使輸出頻率與目標頻率嚴格一致,采取了一些細節處理,當加減速時間較短時,在加減速的過程中,每次頻率調節的data可能> 0.01 Hz,因此當目標頻率fn和被調節頻率fc之差駐f *與駐f不成整數倍時,會造成目標頻率與輸出頻率不一致。即

因此,最后一次調節的頻率是data0,頻率變化的具體流程圖如圖5所示。
3.2 帶力矩補償的V/f曲線的實現
在電機的啟動過程中,由于電機阻抗壓降的影響,并不能保證電機為恒磁通,尤其在剛啟動時,電機的阻抗壓降更不能忽略。對于普通的通用變頻器而言,V/f控制曲線的設置是其核心功能,既可以事先設置好固定的帶轉矩提升可選擇的V/f曲線,也可以根據負載具體要求由用戶自己設置曲線模式。具體如圖6 所示,其中:fmin 為最低輸出頻率,fA為中間輸出頻率,fB為基本輸出頻率,fmax為最高輸出頻率,Vmin最低輸出電壓,VA為中間輸出電壓,VB為基本輸出電壓,Vmax為最高輸出電壓。
由給定的頻率f,就可以由V/f曲線得出輸出電壓值UAC,流程圖如圖7所示。
3.3 故障保護
本系統中的故障保護是通過硬件中斷來實現的,由DSP的引腳PDPINTA向CPU申請中斷,CPU響應中斷后,首先關斷SVPWM 波形發生器,然后檢測中斷源,設置故障標志,通過通訊中斷及時向上位機送出故障類型。其流程如圖8所示。










評論