無速度傳感器矢量控制變頻系統研究

0 引言
本文引用地址:http://www.104case.com/article/201808/387554.htm矢量控制也稱磁場定向控制。它是上世紀70年代初由德國西門子公司F. Blaschke等人首先提出,以直流電動機和交流電動機比較的方法分析闡述了這一原理。作為異步電機控制的一種方式,矢量控制技術已成為高性能變頻調速系統的首選方案。隨著計算機技術飛速發展,功能強大的數字信號處理器(DSP)的廣泛應用使得矢量控制逐漸走向了實用化。
在高性能的異步電機矢量控制系統中,轉速的閉環控制環節一般是必不可少的。通常,采用光電碼盤等速度傳感器來進行轉速檢測,并反饋轉速信號。
但是,由于速度傳感器的安裝給系統帶來一些缺陷使得系統的成本大大增加;精度越高的碼盤價格也越貴;碼盤在電機軸上的安裝存在同心度的問題,安裝不當將影響測速的精度;使電機軸的體積增大,而且給電機的維護帶來一定困難,在惡劣的環境下,碼盤工作的精度易受環境的影響。因此,越來越多的學者將眼光投向無速度傳感器控制系統的研究。
1 轉子磁場定向無速度傳感器矢量控制原理
1.1 系統矢量控制原理
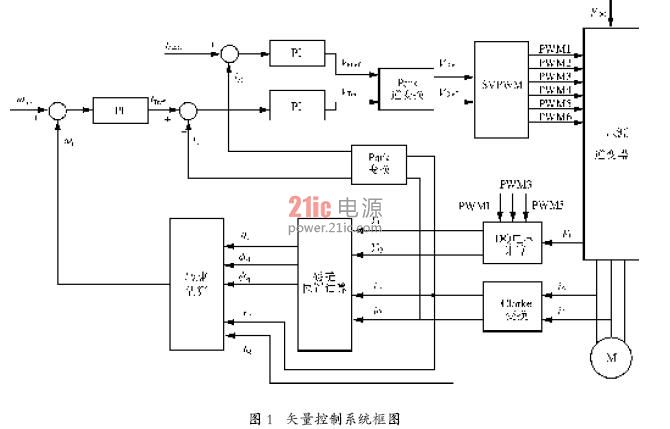
所謂無速度傳感器控制系統就是取消了傳統的交流電機調速系統中的速度檢測裝置,通過檢測定子的電壓電流來間接估算電機運行的實際轉速值,將該值作為轉速反饋信號。本系統采用電流與電壓相結合的轉子磁鏈估算模型以及基于異步電機數學模型的速度估算方法,可得轉子磁通位置角,并送至旋轉變換環節。用霍爾電流傳感器檢測三相輸出的兩相電流iA、iB,計算出第三相電流iC=-(iA+iB),從而獲得實時的輸出電流信號,亦為電機上的電流信號,為矢量控制的計算提供實時信號。由測得的電流經矢量變換得到轉矩電流分量iT和勵磁電流分量iM,利用iMref-iM、iTref-iT所產生的電流誤差經PI 控制器產生VMref、VTref ,經旋轉變換后求出兩相輸出電壓VDref、VQref,進而控制逆變器。圖1是其矢量控制系統框圖。
1.2 異步電機轉子磁場定向基本方程
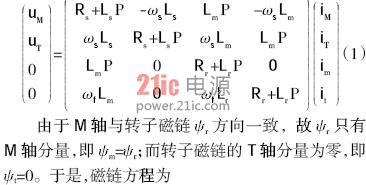
如果規定MT 坐標系的M 軸沿著轉子磁鏈鬃r的方向,則MT 坐標系就沿轉子磁場定向,此時異步電機的電壓方程為

1.3 轉子磁鏈位置的估算
在轉子磁場定向的無速度傳感器的異步電機控制系統中,轉子磁鏈估算是至關重要的一環。如果轉子磁鏈估算不準確,則轉子磁場定向控制系統的優點,即實現轉矩和磁通的解耦控制將無法實現。根據兩相旋轉坐標系下異步電機的基本方程,可以得到電流型轉子磁鏈估算模型。
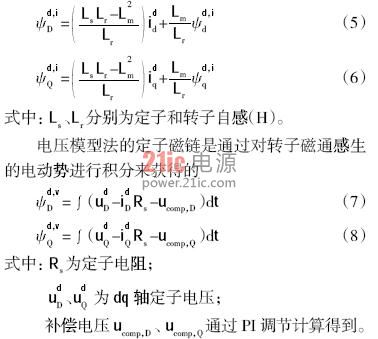
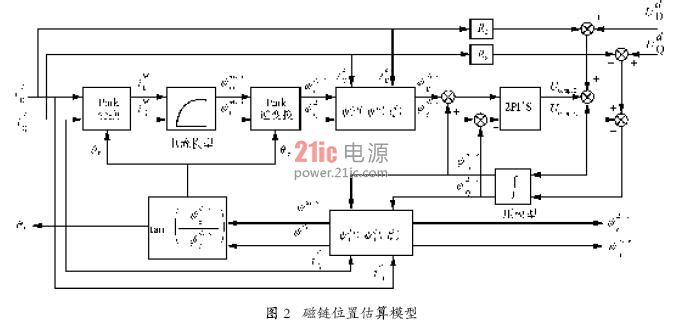
在低頻時,式(7)和式(8)中的定子電壓值變小,定子電阻壓降的偏差對積分結果的影響增大,因此必須準確檢測定子電阻,但是定子電阻會隨溫度變化,要十分準確地檢測是比較困難的。而對于電流模型來說,電動機在高速運行時,由于電機參數的偏差,容易引起磁通振蕩。所以,本系統將這兩種方法綜合在一起,以相互彌補高頻和低頻的不足。其運算框圖如圖2所示。
1.4 轉速的估算
根據兩相靜止坐標系下異步電機的基本方程,












評論