關于自動駕駛的全面解析

車輛定位
自動駕駛中車輛精確定位的方法主要有3種:
第一種是通過高精度的差分GPS+慣性導航IMU來完成,GPS定位精度高,但是刷新速度較慢,IMU刷新速度快,但是存在累積誤差,兩者配合使用剛好可以獲得快速且精確的位置信息。
第二種是通過激光雷達+高精度地圖來定位,將激光雷達掃描周圍環(huán)境所獲得的點云與高精度地圖進行比對和匹配,從而獲得位置信息。
第三種是通過攝像頭圖像數(shù)據(jù)+視覺地圖來定位,將攝像頭在行駛過程中拍攝到的圖像數(shù)據(jù),包括圖像靜態(tài)信息和圖像間的移動信息,與視覺地圖進行比對和匹配,可以獲得位置信息。或者從圖像中提取一些關鍵目標及其精確的幾何特征(如車道線、地面標記、交通標牌、紅綠燈等),將其和高精度地圖中存儲的信息進行對應和匹配,完成定位功能。
環(huán)境理解
包括物體識別和物體追蹤,比如行人識別、車輛識別、車道識別、交通標識識別、行駛中車輛的追蹤、行動中行人的追蹤等。深度學習在這些應用中展現(xiàn)出了比傳統(tǒng)計算機視覺技術(shù)更好的性能,從而被廣泛應用。
行為預測
人類智能在駕駛中體現(xiàn)在可以根據(jù)動態(tài)變化的環(huán)境實時調(diào)整駕駛策略,同樣機器也需要對車輛周邊的人、車、物的行為進行預測,從而做出安全駕駛決策。
行動規(guī)劃
根據(jù)車身狀態(tài)數(shù)據(jù)、局部環(huán)境數(shù)據(jù)做出當下最優(yōu)的行動選擇,包括加速、剎車、變換車道、轉(zhuǎn)彎等。
路徑規(guī)劃
從出行需求出發(fā),在高精度地圖的基礎之上,根據(jù)全局路網(wǎng)數(shù)據(jù)和宏觀交通信息,繪制一條從出發(fā)點到目標點的最優(yōu)行車路徑。
實事求是地說,國內(nèi)真正進入到?jīng)Q策層的企業(yè)不多,有做園區(qū)、機場擺渡車的馭勢科技,做高速公路貨運的圖森互聯(lián),還有做園區(qū)無人車和干預輔助類高級ADAS系統(tǒng)的智行者。你們聽說過的那些單目、雙目、環(huán)視視覺ADAS公司實現(xiàn)的大多是預警提示類功能,如碰撞預警、盲點監(jiān)測等,只是停留在感知層面,沒有涉及到?jīng)Q策。相比之下國外在決策層探索的企業(yè)就很多了,Drive.ai,Comma.ai,nuTonomy,zoox,F(xiàn)araday,Cruise,Otto,Navya等等。國內(nèi)的路況確實比國外復雜得多,再加上中國政府還不允許自動駕駛車輛上路路測,這些都制約著國內(nèi)企業(yè)在決策層發(fā)力。
識別算法業(yè)內(nèi)有KITTI(用于評測目標檢測、目標跟蹤、語義分割等)和Cityscapes(用于評測像素級場景分割和實例標注等)等公開數(shù)據(jù)集進行評測,但是對決策質(zhì)量和規(guī)劃能力的好壞還沒有統(tǒng)一評價標準,因而無從判斷各家技術(shù)能力的強弱,只能從公布的Demo中窺測一二。
執(zhí)行層
自動駕駛的執(zhí)行層離不開和車載控制系統(tǒng)的深度集成,可惜車廠和Tier1出于自我保護,不愿意對外開放車輛控制總線,一些創(chuàng)企無法對原車做改動,不得已只能另外附加一套電機裝置,通過電機拉動鋼絲繩,鋼絲繩再拉動油門、制動、轉(zhuǎn)向等裝置完成執(zhí)行動作。這種做好確實非常笨拙,操控性和可靠性很差,根本無法體現(xiàn)自動駕駛的優(yōu)勢。真正的自動駕駛必須要將決策控制信息與車輛底層控制系統(tǒng)深度集成,通過線控技術(shù)完成執(zhí)行機構(gòu)的電控化,達到電子制動、電子驅(qū)動和電子轉(zhuǎn)向。
歸根結(jié)底,自動駕駛的落腳點在“駕駛”不在“自動”,“大腦”再發(fā)達也要靠“雙腳”來行走。不把人工智能算法落地到車輛的控制執(zhí)行,你永遠不知道有多少dirty work要做。例如車的轉(zhuǎn)向、制動、加速,你究竟要把方向盤打多大何時回輪、剎車踩多大、
歸根結(jié)底,自動駕駛的落腳點在“駕駛”不在“自動”,“大腦”再發(fā)達也要靠“雙腳”來行走。不把人工智能算法落地到車輛的控制執(zhí)行,你永遠不知道有多少dirty work要做。例如車的轉(zhuǎn)向、制動、加速,你究竟要把方向盤打多大何時回輪、剎車踩多大、驅(qū)動給多少,人類司機是憑經(jīng)驗來執(zhí)行的,但是對自動駕駛系統(tǒng)來說,需要很多汽車動力學的knowhow才能完成。如果你只是單純地在計算機上跑幾個Demo,沒有實打?qū)嵉厣宪嚶窚y過,哪家車廠敢用你的算法?真上路還不得撞得人仰馬翻?那些單靠幾個博士弄個算法跑個測試集刷刷榜就想出來融資的初創(chuàng)都是耍流氓。業(yè)內(nèi)人打趣說,做自動駕駛只要撞死個人,公司就可以直接倒閉了,融的那點錢還不夠賠償費呢!大家所熟知的國內(nèi)計算機視覺領域四大獨角獸,都未染指自動駕駛(商湯只是聲稱可以提供算法支持,和真正做自動駕駛還差得遠呢),視覺算法在人臉識別、安防監(jiān)控領域落地相對比較容易,但是在自動駕駛領域要實實在在做車的話還是有很多坑的,這就是為什么國內(nèi)涉及決策層和控制層的企業(yè)這么少的原因。
中國人要想碰執(zhí)行層確實非常難,國內(nèi)在線控技術(shù)上仍處在研發(fā)初始階段,技術(shù)底子薄,積累時間不足。國外車廠和Tier1壟斷了自動駕駛控制執(zhí)行部分,同時它們在感知和決策部分也在不遺余力地投入研發(fā),憑借多年積累的工程能力、產(chǎn)品化能力和汽車經(jīng)驗,已有符合車規(guī)的產(chǎn)品成熟量產(chǎn),對國內(nèi)企業(yè)來說確實是不小的壓力。創(chuàng)業(yè)企業(yè)可以通過和國產(chǎn)車廠、國產(chǎn)供應商合作研發(fā),共同抵制國外廠商,也可以和深諳執(zhí)行器改裝的團隊合作,介入執(zhí)行層,總之未來的競爭不會是單個企業(yè)實力的比拼,而是生態(tài)聯(lián)盟間的合縱連橫。
自動駕駛的基本技術(shù)架構(gòu)
關于自動駕駛的全面解析
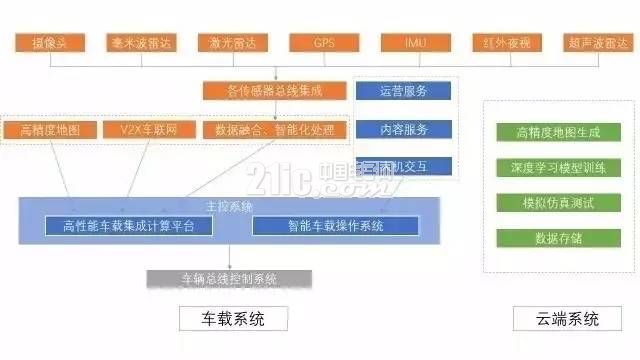
上圖是我畫的自動駕駛基本技術(shù)架構(gòu),由車載系統(tǒng)+云端系統(tǒng)組成。
車載部分
感知層各種類型的傳感器采集、接收的數(shù)據(jù),通過總線進行集成,再通過數(shù)據(jù)的融合和智能化處理,輸出自動駕駛所需的環(huán)境感知信息。車載傳感器的優(yōu)化配置,可以在保證精度和安全性的基礎上,降低整體成本。
主控系統(tǒng)由硬件部分高性能車載集成計算平臺和軟件部分智能車載操作系統(tǒng)組成。計算平臺融合了傳感器、高精度地圖、V2X的感知信息進行認知和決策計算,硬件處理器可以有GPU、FPGA、ASIC等多種選擇,它們各自的優(yōu)缺點可以參見小研以前的分析文章《AI時代,我的中國“芯”》。智能車載操作系統(tǒng)融合了車內(nèi)人機交互、運營服務商、內(nèi)容服務商的數(shù)據(jù),為乘客提供個性化服務,真正把智能車變成下一個“互聯(lián)網(wǎng)入口”,目前的主流操作系統(tǒng)包括Android、Linux、Windows、QNX、YunOS(阿里云提供)等。






評論