Uber自動駕駛撞人原因解析:一場原本可避免的災難

日前,一輛Uber自動駕駛汽車在美國亞利桑那州坦貝市的一條街道上,以每小時65公里的速度撞上了一位橫穿馬路的女子。該女子在送往醫(yī)院后不久,不治身亡。這是全球首例自動駕駛汽車路測撞死行人的交通事故,引發(fā)了公眾的極大關(guān)注以及對自動駕駛汽車安全性的擔憂。
本文引用地址:http://www.104case.com/article/201804/377743.htm事發(fā)后不久,坦貝市警察局局長對媒體表示,這場車禍無論是不是人類駕駛,都是不可避免的,這可能不是Uber的錯。
然而,這真的是一場無可避免的交通悲劇嗎?
眾說紛紜的車禍原因
車禍發(fā)生后,很多媒體和專家對車禍原因做了分析和猜測。
美國的網(wǎng)友看過視頻后表示,在光線昏暗的情況下,攝像頭的“視力”通常差得要命,如果用肉眼觀察,也許能更早注意到行人橫穿。
地平線機器人創(chuàng)始人余凱在接受媒體訪談時,分析猜測認為造成有可能是這輛自動駕駛汽車的預測判斷做的不好,出現(xiàn)了問題,沒能準確預判出障礙物的走向。
眼擎科技創(chuàng)始人朱繼志在其微博中表達了不同的看法。他認為,問題在于攝像頭,人從暗部走向亮部,因為路燈的原因,光線明暗反差太大。在暗部的時候,汽車沒有監(jiān)測到,等行人走到亮部的時候,汽車雖然監(jiān)測到,但已經(jīng)太遲了。
同時,他認為夜間道路光線環(huán)境太復雜,汽車攝像頭的動態(tài)范圍需要提升30倍以上,自動駕駛汽車才有上路的可能。
也有業(yè)內(nèi)人士分析,這輛Uber自動駕駛汽車已經(jīng)檢測到了行人,只是沒有采取剎車或停車措施,致使釀成撞人事件。
傳統(tǒng)成像技術(shù)的天花板
眾所周知,當前無人駕駛汽車所采用的視覺系統(tǒng) ,主要是基于攝像頭和光學雷達。有業(yè)內(nèi)人士對其相關(guān)的視覺性能優(yōu)勢和缺陷做了分析對比:

從圖中我們不難得出一個結(jié)論,沒有一種方案是完美無瑕,萬無一失的。對于基于傳統(tǒng)成像技術(shù)的攝像頭而言,受光照條件的影響非常大,在強光、弱光、逆光、反光等情況下,基本歇菜。
而當前最受車企青睞的激光雷達,也有很難逾越的短板。且不說,短期內(nèi)無法迅速降低的成本,除了分辨率低外(當然現(xiàn)在已經(jīng)有128線,甚至300線的激光雷達,但與攝像頭的分辨率還是不可同日而語),最大的問題是無法辨識顏色,即無法表示交通標示。
另外,激光雷達也受環(huán)境的影響,就連特斯拉和谷歌都承認,即使是堆滿昂貴攝像頭和激光雷達的無人駕駛汽車在大雪天也基本被廢掉一半功力。
現(xiàn)在的自動駕駛汽車都采用攝像頭與雷達搭配的方案(或激光雷達+攝像頭,或毫米波雷達+攝像頭),妄圖彌補各自的不足。但顯然這樣的策略也沒有達到1+1>2的效果。原因很簡單,一方很難彌補另一方的短板。比如Uber自動駕駛汽車撞人致死的事件中,顯然車上的攝像頭因為光線問題沒有監(jiān)測到正要橫穿馬路的路人(除非汽車的剎車系統(tǒng)壞掉了),而激光雷達即使監(jiān)測到了有反射信號,也無法判斷出是行人。正如有專家分析,因為其局限性,光學雷達并不是為檢測行人設(shè)計的。因為光學雷達分辨率有限,刷新率不高,更無法獲取物體對象的顏色信息。所以它不善于實時地分辨物體。
給自動駕駛汽車一雙慧眼
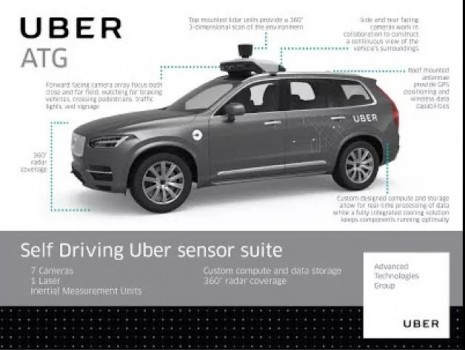
從Uber自動駕駛汽車傳感器示意圖看,這輛出事的自動駕駛汽車上面也安裝了不少攝像頭,并且這些攝像頭都正常工作,卻并沒有避免悲劇的發(fā)生。為什么?
很簡單,這些攝像頭的視覺能力比不上人眼。
正如專家所說,傳統(tǒng)的攝像頭成像技術(shù),機器的視覺能力無法與人的眼力相比,甚至很難接近。因為傳統(tǒng)的成像技術(shù)更專注于做給人看的圖像處理,即做圖像的優(yōu)化。而在機器的眼中,不注重像素高低,更不需要美顏,它需要的是精準的測量現(xiàn)實世界,不僅色彩高度還原、而且邊緣清晰、銳度高等。
這就意味著傳統(tǒng)的攝像頭無法滿足AI機器在復雜光線下的正常運作。
而對于駕駛員輔助系統(tǒng),關(guān)鍵挑戰(zhàn)則在于保證系統(tǒng)在任何環(huán)境狀況下(溫度變化、陽光照射、黑暗中或雨雪天氣)都能正常工作,而且還要能辨認出300米以外的物體。
事故發(fā)生后,Uber暫停了自動駕駛汽車路測,豐田暫停了自動駕駛汽車的路測,據(jù)說,英偉達也暫停了自動駕駛汽車的路測。









評論