工業機器人百科,如果你還不了解就out了!

工業機器人性能評判標準
本文引用地址:http://www.104case.com/article/201610/311060.htm
工作空間
工作空間是指機器人臂桿的特定部位在一定條件下所能到達空間的位置集合。工作空間的性狀和大小反映了機器人工作能力的大小。
運動自由度
運動自由度是指機器人操作機在空間運動所需的變量數,用以表示機器人動作靈活程度的參數,一般是以沿軸線移動和繞軸線轉動的獨立運動的數目來表示。
自由物體在空間自六個自由度(三個轉動自由度和三個移動自由度)。工業機器人往往是個開式連桿系,每個關節運動副只有一個自由度,因此通常機器人的自由度數目就等于其關節數。機器人的自由度數目越多,功能就越強。
有效負載
有效負載是指機器人操作機在工作時臂端可能搬運的物體重量或所能承受的力或力矩,用以表示操作機的負荷能力。
機器人在不同位姿時,允許的最大可搬運質量是不同的,因此機器人的額定可搬運質量是指其臂桿在工作空間中任意位姿時腕關節端部都能搬運的最大質量。
運動精度
機器人機械系統的精度主要涉及位姿精度、重復位姿精度、軌跡精度、重復軌跡精度等。
位姿精度是指指令位姿和從同一方向接近該指令位姿時的實到位姿中心之間的偏差。重復位姿精度是指對同指令位姿從同一方向重復響應n次后實到位姿的不一致程度。
軌跡精度是指機器人機械接口從同一方向n次跟隨指令軌跡的接近程度。軌跡重復精度是指對一給定軌跡在同方向跟隨n次后實到軌跡之間的不一致程度。
運動特性
速度和加速度是表明機器人運動特性的主要指標。在機器人說明書中,通常提供了主要運動自由度的最大穩定速度,但在實際應用中單純考慮最大穩定速度是不夠的,還應注意其最大允許加速度。
動態特性
動態特性結構參數主要包括質量、慣性矩、剛度、阻尼系數、固有頻率和振動模態。
工業機器人全方位解讀
01 我國的工業機器人現狀
工業機器人能在中國市場異軍突起:
首先是因為在成本上,機器人通常僅為人工成本的四分之一;
其次,機器人在質量、效率、管理等方面還能帶來很多新的附加值。
所以,在機器人技術快速提升、價格大幅下降、人工短缺、人力成本上升等因素的綜合作用下,中國的工業機器人產業正處于一個井噴時代。
02 工業機器人的關鍵技術
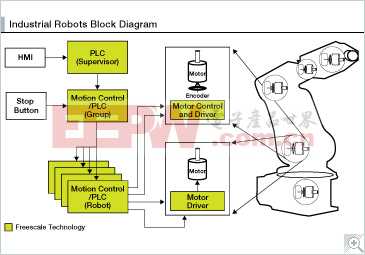
工業機器人由3大部分6個子系統組成。3大部分是機械部分、傳感部分和控制部分。6個子系統可分為機械結構系統、驅動系統、感知系統、機器人-環境交互系統、人機交互系統和控制系統。
機器人關鍵基礎部件主要分成以下三部分:高精度減速機,高性能交直流伺服電機和驅動器,高性能控制器等。機器人性能指標主要有工作空間、自由度、有效負載、運動精度、運動特性、動態特性等。
03 工業機器人面臨的技術挑戰
由于關鍵零部件受國外技術壟斷,國產機器人并不具備顯著成本優勢。同時,大量機器人的生產廠商存在低端鎖定的風險。另外,機器人研發、制造與應用之間缺乏有效銜接。





評論