變速積分PID在滾刺機中的應用

4 算法分析
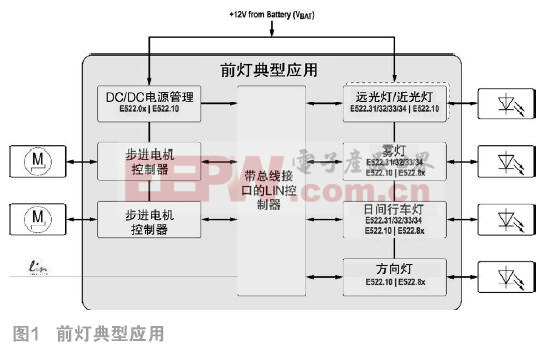
本文引用地址:http://www.104case.com/article/201609/310494.htm由于速度調節是在一定的速度基礎上進行的,控制器只需要輸出電壓的變化量,因此,采用增量式PID控制算法。控制器的輸入量為傳感器檢測到的速度與設定速度的偏差信號,輸出量為控制電機轉速的驅動電壓的增量。電機速度閉環控制系統組成框圖如圖5所示。
在PLC中難以實現微分與積分,卻可以實現差分,故把它改為差分方程形式:
 (10)
(10)
其中,T為采樣周期,k為采樣序號,![]() 分別為第次和k次采樣所得的偏差信號。
分別為第次和k次采樣所得的偏差信號。
 (11)
(11)
由式(10)和式(11)便可得出增量式PID 算法:
![]() (12)
(12)
式中:![]() 。
。
式(12)表示了各次誤差量對控制作用的影響,而且,增量式PID 控制算法只要存儲最近三次采樣值就可以了。

實際控制過程:光電編碼器反饋回電機轉速信號并轉化為電機轉速偏差信號經過PID控制器以及一系列計算處理之后,得到電機的驅動電壓偏差,進而得到新的電機驅動電壓, 最后經過脈寬調制器產生PWM 控制信號控制電機運轉。考慮到偏差較大時, 要求快速跟蹤;偏差較小時,要求精度高。但這兩個要求存在一定的矛盾,如果按快速跟蹤來設計控制器,在偏差小時會產生振蕩或超調;如果按精度高來設計控制器,在偏差大時無法快速跟蹤。為了使系統在偏差大和小時都能滿足要求,采用了變速積分增量式PID算法,通過不斷改變積分項的累加速度,使其與偏差大小相對應,偏差越大,積分越慢;反之則越快。


在選擇PID參數的過程中,通常可先根據輸出曲線的形狀來確定參數Kp、KI和KD的大體范圍,然后根據系統的輸出,得到參數的具體值。采用Ziegler-Nichols整定經驗公式來確定參數Kp和KD的值分別為60和3 ;變速積分PID中的常數A和B分別為0.7和0.2。
5 仿真結果分析
系統的速度響應曲線仿真圖如圖6所示。

由圖6的階躍響應仿真結果可知,采用變速積分增量式PID控制可以避免普通增量式PID 控制所產生的過大超調,同時又提高了電機調速的快速性,其達到最高速的時間為3 s , 而普通增量式PID控制算法達到勻速的時間為5 s ,傳統交流異步電動機啟動時間為16s。因此,采用變速積分增量式算法, 系統具有動態響應快、控制穩態性能好, 并能很快趨于穩定的特點, 適用于電機調速系統的高速控制。
6 結論
1) 使用設計的變速積分PID控制算法,通過參數分情況加入不同積分的作用進行控制,使滾刺機在啟動控制上具備了啟動速度快,控制精度高的良好特性,并克服了電機系統本身的滯后問題;

2)文中設計的新型PID控制方法,在鋼廠現場有比較大的負載干擾的情況下仍然能在3s內很好的準確達到設定速度,完全滿足鋼廠實際滾除毛刺的工藝要求。
參考文獻:
[1]徐靜,阮毅,陳伯時.異步電機按定子磁場定向的轉差頻率控制[J].電機與控制學報,2003,7(1):1-4.
[2]解宏基,任光,朱利民,等.交流三相異步電動機建模及仿真研究[J].大連海事大學學報,2000,30(2):60-64.
[3]程偉,馬樹元,吳平東,等.交流異步電機的建模與仿真[J].計算機仿真,2005,(3):69-70.
[4]Yuan-yih Hsu,Kan-lee Liou.Design of Self-turning PID Power System Stabilizers for Synchronous Generators[J].IEEE Trans EC,1987,2(3):343-348.
[5]譚寶成,黨莉.變速積分增量式PID在氣力除灰控制系統中的應用[J].西安工業大學學報,2010,30(5):478-481.
[6]賈建強,韓如成,左龍.基于MATLAB/SIMULINK的交流電機調速系統建模與仿真[J].電機與控制學報,2000,4(2):91-93.
本文來源于中國科技期刊《電子產品世界》2016年第9期第61頁,歡迎您寫論文時引用,并注明出處。



評論