基于ARM的微型航姿參考系統設計與實現

求解上述微分方程較常用的方法有泰勒展開法、比卡逼近法、四階-龍格庫塔法,考慮到算法的精度、速度與復雜度,本文選用了四階-龍格庫塔法。
本文引用地址:http://www.104case.com/article/201609/304287.htm
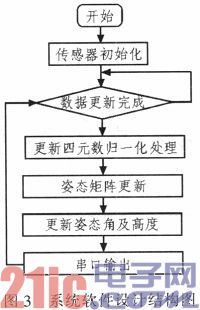
4 系統軟件設計
AHRS的軟件設計流程圖如圖3所示。其中傳感器初始化部分包括設置傳感器量程,以及陀螺儀的零飄檢測,氣壓高度計的初始標定。每當傳感器完成一次數據的采集,就會向ARM處理器發出中斷請求,然后ARM處理器通過I2C總線讀取數據并完成處理,以此來達到快速響應的目的,另外氣壓高度計的轉換時間較慢,為了保證系統的實時性,本文采用定時的方式來讀取氣壓值。
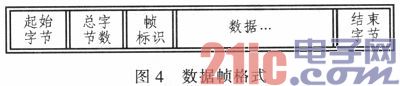
串口發送的數據除了歐拉角外,還包括各個方向的角速度、加速度和地磁場強度以及陀螺常值漂移和磁航向誤差補償系數。由于串口數據發送量較大,因此將導航數據幀分段發送。導航數據幀的幀頭為0xAA、0x55,幀尾為0x55、0xAA,數據幀中每個物理量都是32位浮點型數據,數據幀格式如下圖4所示。
在實際環境中,地磁場不可避免會受到干擾磁場的影響,地磁場的測量會帶來一定的誤差,計算得到的磁航向角也會有偏差。為了保證航姿系統輸出較為精確的航向角,需對磁場干擾進行補償。
本文采用最小二乘擬合法,基本方法如下:選擇一干凈磁場環境,將電子羅盤置于轉臺上,調節轉臺使俯仰角為0°,將電子羅盤指北軸對準磁北,控制轉臺以一定度數間隔轉動一圈,存儲下每個點電子羅盤實際輸出的磁航向角;調節轉臺使俯仰角不為0°,重復上一步的動作,并根據具體情況控制標定次數。上述過程可以稱之為定標過程,電子羅盤在定完標后使用時就可根據存儲器中的數據自動進行誤差補償。
這里討論的最小二乘擬合算法不同于以往的最小二乘誤差補償法,它不是僅僅考慮了水平面內的誤差補償,還考慮了不同俯仰角下的情況。用電子羅盤作標定試驗時,由于有真實的航向角作參考,且標定數據點較多,最終擬合后的值相當于把安裝誤差、靈敏度等影響航向角精度的其他因素都考慮進去了,又因為擬合用到的數據預先已存放在存儲器中,所以做完最初的一輪標定試驗后,以后便可進行自動補償了,可見這樣的方法具有較強的實用價值。
5 算法驗證與實現
為了驗證AHRS的穩定性及算法的有效性,本文用LabWindows/CVI設計了一個簡易的上位機程序,以便于AHRS通信,實時觀測姿態角的變化,如圖5圖6所示。實際測試中,系統歐拉角的更新速度達到30 kHz,已滿足微型飛行器的控制要求。

6 結論
航姿參考系統是微小型飛行器的自主飛行的基礎環節,本文采用常用的ARM與MEMS器件,結合四元數算法設計了一套針對微小型飛行器的AHRS系統,它具有體積小、價格低廉、精度高、實時性好的特點,從實際測試來看,設計方案是可行、可靠的。該系統具有模塊化的特點,也可方便應用于其他需要對姿態測量的系統中。









評論