基于滑模控制的三電平PWM整流器建模及仿真

1引言
本文引用地址:http://www.104case.com/article/201540.htm隨著電力電子裝置的廣泛應用,大量低功率因數的二極管不控整流和晶閘管相控整流設備,僅能實現能量的單向輸送,對電網的諧波污染嚴重。可逆PWM整流器不僅具有能量可雙向傳輸、網側電流正弦及達到單位功率因數等特點,還解決了傳統整流裝置中存在的諸多問題,近年來越來越受到關注,具有廣闊的應用前景[1]。在中高壓大功率的應用場合,三電平PWM整流器應用較為廣泛,它的功率因數達到1,相對于兩電平PWM整流器,有以下優點:(1)每一個主功率開關管上承受的電壓峰值只有兩電平PWM整流器的1/2;(2)三電平PWM整流器有27個工作狀態,使得輸入側電流波形在開關頻率較低時也能保持一定的正弦度;(3)在相同開關頻率及控制條件下,三電平PWM整流器輸人電流的諧波遠遠小于兩電平整流器,它更適合于高壓大功率的場合。目前三電平PWM整流器通常采用同步旋轉d-q坐標系下雙閉環PI控制算法,但由于PWM整流器是一個非線性、時變不確定系統[2][3],故采用常規PI控制很難達到理想的控制效果,動態性能較差。
滑模變結構控制(SMC)是一種非連續性控制,其控制特性可以迫使系統在一定條件下,沿規定的狀態軌跡作小幅度、高頻率的上下運動,即“滑模”運動。由于具有快速響應、對參數變化不靈敏、抗干擾能力強,實現簡單等本質上的優點,SMC在非線性系統中得到了越來越多的應用[4][5]。
本文基于三電平PWM整流器的雙閉環控制系統,為了提高系統魯棒性和輸出電壓動態響應,采用滑模控制器設計了電壓外環,與常規PI控制器的電流內環組成了雙閉環控制系統。仿真結果表明:在大功率且負載大范圍變化的情況下,較常規PI控制器,采用滑模控制器的三電平PWM整流器直流母線電壓波動明顯減小,直流環節的動態響應得到有效提高,為進一步減小直流母線電容提供了可能。
2整流器的數學模型
二極管箝位三電平PWM整流器拓撲如圖1所示,Ls和Rs分別是交流側電抗器等效電感和等效內阻,Cd1、Cd2是直流側上下母線電容,RL是直流側負載電阻;ea、eb、ec是電網相電壓,ia、ib、ic是電網相電流,Vdc1、Vdc2分別是母線電容Cd1和Cd2的電壓,IL是負載電流。假設電網電壓(ea,eb,ec)為純正弦、對稱的三相電壓。引入三電平整流橋三相橋臂的開關函數Sip、Sio、Sin(i=a、b、c),其意義為:
(1)S1i,S2i開通,S3i,S4i關斷,則Sip=1,Sio=0,Sin=0;
(2)S2i,S3i開通,S1i,S4i關斷,則Sip=0,Sio=1,Sin=0;
(3)S3i,S4i開通,S1i,S2i關斷,則Sip=0,Sio=0,Sin=1。
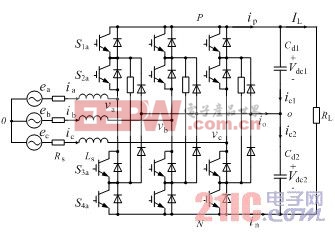
圖1三電平PWM整流器主電路拓撲
省略公式推導,可得a-b-c坐標系下系統的數學模型為:
式中:
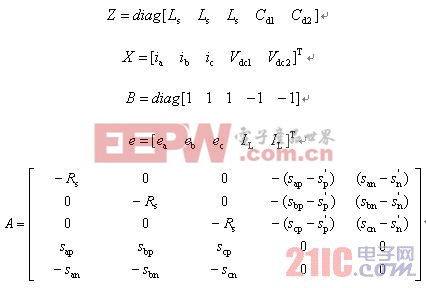
其中,
基于a-b-c坐標系下的數學模型物理意義明晰,但模型交流側變量均為時變的交流量,不利于控制系統的設計。而在同步旋轉d-q坐標系下,三相對稱系統中各個交流量均可以等效為直流量。為此,引入坐標變換,得到d-q坐標系下的數學模型。
式中:

設vd和vq為旋轉d-q坐標系下網側電壓的d軸和q軸分量,則有:

式中是微分算子。
忽略母線上下電容之間的誤差,認為Cd1=Cd2=Cd,則有:
根據上述模型,得到d-q坐標系下三電平PWM整流器的等效電路如圖2所示。對于直流側,三電平整流橋相當于兩個電流源,而對于交流側,三電平整流橋則相當于兩個電壓源。
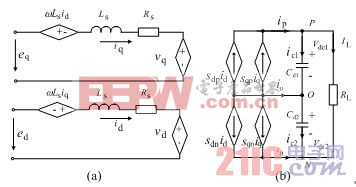
圖2d-q坐標系下三電平整流器等效電路
3電壓外環滑模控制器設計
三電平PWM整流器外部控制變量有兩個:Vdc和iq,其中Vdc受控于sd,以維持直流母線電壓的穩定;iq受控于sq,以控制系統無功電流(單位功率因數、超前、滯后)。把Vdc和iq作為可控輸出,得出狀態空間標準形為
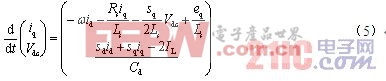
將參考值和實際變量之間的誤差帶入式(5)得

式中,eig=iqref–iq;eVdc=Vdcref–Vdc;eΦ=Φref–Φ;Φ是擾動量;
由式(6)和已知的兩個控制自由度選擇如下滑模面可保證閉環系統的魯棒性。

式中,是和直流電壓一階響應相關的參數。
由式(3)、(4)將變為

在d-q旋轉坐標系中,,eq=0,在理想的滑模狀態下由式(5)計算sq,并將結果簡化得:
同理,在理想滑模面上,輸出電壓精確跟蹤參考值,Vdc=Vdcref,并根據功率平衡可得到:
將式(10)和式(11)代入式(9),得:
則sd和sq與滑模面的選擇沒有很大聯系,簡化了滑模控制器的設計。滑模面為:
由式(12)和式(14)得出電壓外環控制器控制方程
因此,采用如下控制策略實現三電平PWM整流器的滑模變結構控制:設定iqref,采用PI控制器對電流環進行控制;電壓外環控制采用滑模變結構控制算法,以實際輸出電壓Vdc和給定電壓Vdcref為控制器輸入,控制器輸出作為電流環PI調節器的參考電流idref,實現滑模變結構控制與電壓定向矢量控制的有效結合。其控制結構框圖如圖3所示。
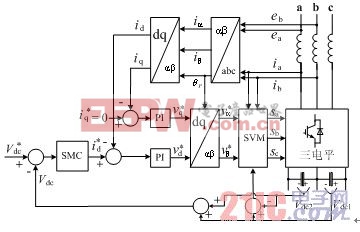
圖3三電平整流器滑模控制原理框圖
4仿真結果
依照前面所述數學模型和控制策略,對本文提出的控制方法的有效性進行了仿真研究。仿真參數如下:輸入電感20mH,直流母線上下電容4000/2μF,輸入相電壓220V,直流母線電壓600V,電網頻率50Hz,開關頻率2kHz,輸出功率5kW,在0.135s時突然加載,在0.25s時,系統開始工作于能量回饋電網模式。圖4給出了三電平PWM整流器母線電壓波形。其中,圖4(a)給出了a相網側相電壓(ea)、電流(ia)仿真波形,可以看出:電壓電流相位一致,經計算功率因數在0.99以上;圖4(b)給出了滿載情況下,網側電流波形及其頻譜,諧波畸變率為2.00%;圖4(c)給出了交流側線電壓波形;圖4(d)和(e)分別給出了采用常規PI控制和滑模控制的直流母線電壓(Vdc)波形,可以看出:在突加負載情況下,兩種控制策略下的直流母線電壓均有跌落,但采用滑模控制下的直流母線電壓變化較小,并且迅速達到穩態。
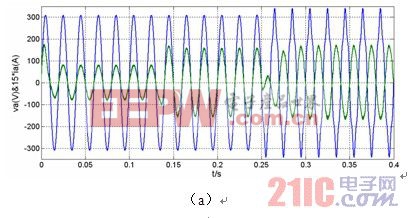
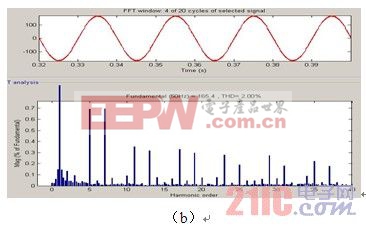
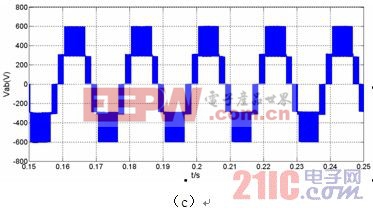
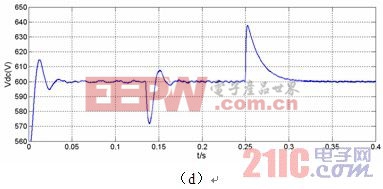
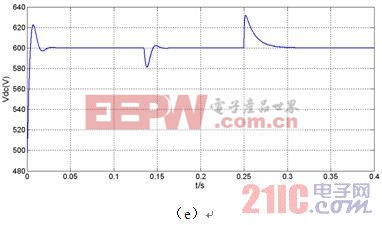
圖4三電平整流器滑模控制仿真結果圖:(a)網側相電壓、電流;(b)網側電流及其頻譜;(c)網側線電壓;(d)常規PI控制條件下直流母線電壓波形;(e)滑模控制條件下直流母線電壓波形
仿真結果表明:采用滑模控制策略,能夠實現三電平PWM整流器的單位功率因數控制,系統具有良好的穩態性能。從直流母線電壓波形可以看出,直流環節的動態響應比較快,負載加載的突變引起母線電壓近18V的跌落。
5結語
本文建立了三電平PWM整流器的數學模型,并基于滑模控制原理設計了電路的控制策略。從仿真結果可知,該控制策略能較好地實現系統輸出電壓穩定,輸入電流正弦、單位功率因數,具有良好的動態和穩態響應。
參考文獻
[1]章浩,謝運祥等.基于滑模控制的三相高功率因數整流器.電氣應用,2008,第27卷第10期.
[2]張穎超.中點箝位三電平雙PWM變頻器控制技術研究.清華大學工學博士學位論文,2008,47-49.
[3]張海濤.基于IGCT的三電平變頻器的控制系統研究.清華大學工學博士學位論文,2006,47-49.
[4]金紅元.三電平PWM整流器研究.華中科技大學博士學位論文,2006,51.
[5]胡慶,于海燕,夏桂文.滑模變結構控制在三相整流器中的應用.沈陽工業大學學報,2002,24(3):139-142.■










評論