電助力轉向與雙后輪驅動相結合的電動汽車運動控制

2. 2 兩驅動輪控制
采用雙后輪獨立驅動方案,每個驅動輪都能獨立提供驅動力,功率可以按需要獨立分配,其差速功能可以由軟件完成,實現電子式差速。
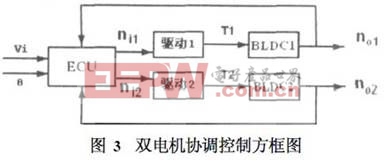
要判斷駕駛員的駕駛意圖是直駛還是轉向,方向盤轉角θ是一個重要參數。策略中引入方向盤自由行程角ε這樣一個標志量,當|θ| > ε時,車輛電控單元(ECU)認為駕駛意圖為轉向,否則為直駛。無論是直駛控制策略還是轉向控制策略,其關鍵點還是通過對目標轉速ni1和ni2的調節來實現對兩側電機的控制,從而達到對車體行走軌跡的操控。雙電機協調控制方框圖見圖3。
1) 直駛控制策略
在直線行駛中,兩側的電機速度no1 和no2很難達到完全一致,總是會存在一定的速度差△n (定義△n = no1 - no2 ) ,ECU需要對△n進行監測,當△n超過系統允許實時速度差np時,就需要根據△n和np 來對目標轉速ni1和ni2進行一定的調節,調節量為nin;為了保證直線行駛的穩定, ECU還需要對兩側電機的累計行程差△S進行監測,當△S超過系統允許實時速度Sp 時,就需要根據△S和Sp對目標轉速ni1和ni2也進行一定的調節,調節量為nis。根據累計行程差計算出nis,nis = C3 △S, C—比例常數,根據試驗確定,不能過大否則容易引起不穩定,計算結果用于調節兩個電機的輸入轉速消減該累計行程差,實現閉環控制。通過累計行程和速度的雙重同步,增強了車輛穩定直線行駛的可靠性。
2) 轉向控制策略
轉向控制時, ECU根據方向盤轉角θ的絕對值大小計算兩側電機的目標轉速差m, 根據θ的正負,確定驅動系統中的兩個電機誰為外側電機和誰為內側電機,外側電機的目標轉速保持當前速度不變,而內側電機的目標轉速則應當在當前目標轉速的基礎上下調m,從而實現轉向。圖4為直駛和轉向的控制流程圖。


伺服電機相關文章:伺服電機工作原理










評論