基于決策導向非循環圖SVM的汽車車型識別

隨著社會的發展,車輛越來越多,交通變得非常繁忙,城市對于公路和交通的管理已成為一個很重要的問題。交通管理部門要實現現代化的科學管理,必須依靠交通管理系統。汽車是交通系統管理中的主要對象,能否自動識別汽車類型成為對公路和交通實現現代化管理的關鍵[1]。
本文引用地址:http://www.104case.com/article/196919.htm現實中種類繁多的汽車,需要實用而有效的車輛分類方法。SVM作為一種新的學習分類方法,目前在人臉識別、對象分類等領域得到了很好的應用[2]。本文應用一種基于DDAG SVM建立分類識別模型的車型識別方法進行車型分類。
1 信息獲取和特征值提取
1.1 車對象獲取
在分類前應先獲取一幅如圖1所示的純背景圖像,再獲取到如圖2所示的同一背景下的車輛圖像后,就可以將兩幅圖像進行逐像素“相減”。背景減法[1],是將圖像中當前幀圖像和背景幀圖像進行背景消除,所得差值(圖像中的灰度值)若大于設定的閾值,則判斷為運動對象目標,如圖3所示;否則即為背景。通過對稱比較圖3與對象原始圖2,存儲圖3中像素點對應的圖2中的顏色值,并進行截取,得到圖4所示的對象,即為差分提取得到的車對象圖像。此方法提取的目標圖像可以克服因攝像機位置移動和光線微弱變化帶來的影響。

1.2 圖像預處理
由于圖像在攝取過程中常會受到噪聲干擾,原本均勻的灰度突然變大或變小,使得圖像的后續處理引入誤差。而均值濾波[2]可以去除背景中的這些干擾。其處理步驟如下:
(1)設置模板大小,選取在灰度圖像f中以(x,y)為中心的5像素×5像素的窗口,濾波次數為兩次。
(2)使模板在圖像中的每個像素上移動,并使模板中心與該像素位置重合。
(3)若平均灰度為a時,令f(x,y)=a。
(4)把被處理點的某一臨域中所有像素灰度的平均值作為該點灰度的估計值,則其預處理后的圖像如圖5所示。

1.3 圖像分割
預處理后的圖像中所包含的灰度信息比較多,還不能容易地進行車型識別,需要將圖像轉化為二值圖像。由于圖像灰度直方圖形狀是多變的,對預處理的汽車圖像,不同的目標區域和背景區域中,同一區域內的像素,在位置和灰度級上同時具有較強的一致性和相關性。因此,本文選用基于“分水嶺”變化的閾值化方法[1],按以下4個步驟完成圖像的分割。
(1)用修正過的開、閉算子進行濾波,消除圖像的亮斑或暗斑,并保持物體的邊界。
(2)確定同質區域,同時為區域做標記。
(3)以區域標記為種子,用類似于區域生長的分水嶺算法進行區域分割。
(4)進行分割質量評價,確定區域是否需要繼續分割,直至轉化為二值圖像。
原圖像經過閾值分割之后,突出了汽車圖像,其效果如圖6所示。車身對象被置為“1”,其他均置為“0”,極大地方便了后期的車型識別。

1.4 圖像特征提取
物體的形狀特征對物體的識別有重要作用[3]。本文選擇的對象形狀特征有:高度、寬度、車頂寬度、周長、面積等。由于這些基本參數大多是一些絕對特征,不能直接用來分析,需要轉換成相對值,本文轉化為頂長比(頂蓬長度與車輛高度之比)、頂高比(頂蓬長度與車輛高度之比),前后比(以頂蓬中垂線為界,前后兩部分之比)和占空比(對象目標的面積與此對象最小外接矩形的面積之比)。實驗結果部分特征數據如表1所示。

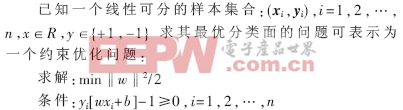
2 支持向量機與非線性分類
2.1 SVM思想
支持向量[3]是指那些距離此最優分類面最近的訓練樣本。支持向量機[4]SVM(Support Vector Machine)是20世紀90年代形成的一種新的模式識別方法,它將待解決的模式識別問題轉化為一個二次規劃尋優問題,理論上保證了全局最優解,避免了局部收斂現象。SVM的主要思想是把非線性可分的數據通過某一變換映射到高維線性空間。
2.2 基于DDAG SVM的非線性分類
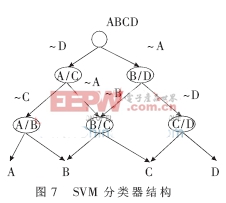
在本文中由于車的特征比較多,采用決策導向非循環圖法DDAG[5](Decision Direct Acyclic Graph),對于n類問題,DDAG方法用一對一的訓練方式進行分類器的構造,即得n(n-1)/2個兩類的SVM分類器。如圖7所示,本文采用SVM的分類器結構共有4(4-1)/2個節點和4個葉子,即需6個分類器,實現多類目標分類,將一輛車的特征值歸于一類或幾類。
需要注意的是,此方法中根部節點分類器的作用很關鍵,因為根節點的分類結果直接影響到下面的路徑,乃至最終的分類結果,選用不同的根節點分類器可能會產生不同的分類路徑。
該支持向量機的具體實驗步驟如下:
針對實際問題,根據分析所涉及對象具有的特征屬性及對象之間差異性,假設以字母A、B、C、D分別代表轎車、面包車、公交車和卡車的類別符號(其中符號“~”表示“非”),分類過程的結構如下:
(1)利用DDAG-SVM法構造多個分類器對車輛大類別內的各子類別進行區分,其中選取形狀差異較大的轎車(A)和卡車(D)作為此層的根節點,以盡量減小分類誤差的積累。
(2)再把轎車(A)、公交車(C)作為根節點的一個子節點,面包車(B)、卡車(D)作為另一個子節點。
(3)進一步劃分為A/B、B/C、C/D 3個節點,即3個分類器。
(4)依次區分出轎車、面包車、公交車和卡車。
3 實驗分析
本文用MATLAB7.0進行仿真實驗,主要選取轎車、面包車、公交車和卡車作為車輛分類圖像模式比對的實驗類型,選取了280個樣本(每類平均70個),其中160個用于訓練,120個用于測試。首先,構造了相應的SVM分類器,提取了180張車圖像的特征值作為訓練集,獲取了最優分類面;然后,將剩余的120張汽車圖像按照同樣的過程進行特征值提取,再在訓練好的支持向量機上進行分類,所得到的分類結果如表2所示,神經網絡的實驗結果如表3所示。
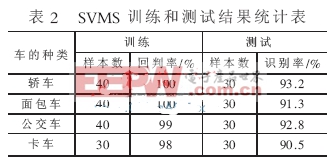
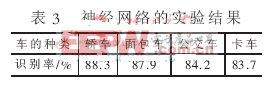
結果表明,與神經網絡方法相比,DDAG SVM是一種對多類車進行分類切實可行的有效方法,不但分類精度高,而且識別效果也比較好。
為了解決對多類車的分類,本文提出了一種基于DDAG SVM對多種車型分類的方法,實驗結果證明,DDAG SVM是一種對多類車進行分類切實可行的有效方法。由于實驗中選用的車輛圖片是以正側面為主,與現實中任意方位角的車輛相比,還只是較特殊的一類,要具有普遍性,還得進一步繼續深入研究。










評論