有機械耦合的電容式硅微陀螺敏感信號讀取

一、前言
本文引用地址:http://www.104case.com/article/195792.htm硅微機械傳感器是用半導體硅加工工藝實現的傳感器。體積小使其獲得廣泛的應用前景。但是由于體積小,微小的絕對機械誤差卻產生較大的相對誤差,帶來運動交互干擾,即機械耦合問題。電容式硅微機械陀螺是用于測量轉動角速度的傳感器。由力學原理可知,由剛體轉動(角速度ωe)和平動(線速度vr),可產生一正交的加速度(科利奧里加速度,科氏加速度ac)。
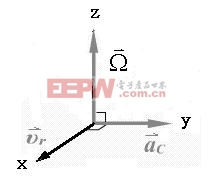
圖1 科氏加速度
Fig. 1 Coriolis acceleration
在設計微陀螺結構時,為了提高靈敏度,往往使驅動軸和敏感軸的諧振頻率盡量接近,從而增加了系統的機械耦合敏感性。由于制造工藝缺陷的存在,產生微結構質量不均勻、梁的彈性不平衡、阻尼不對稱等制造誤差。諸多因素致使驅動軸耦合到敏感軸的振動幅度加大,即機械耦合誤差的增大,使結果產生一個偏移輸出。這種耦合是制約微陀螺性能提高的關鍵問題之一。因此人們提出了各種結構的微陀螺抑制機械耦合。但是由于微陀螺本身的結構特點決定了機械耦合誤差并不能被徹底消除。
目前從電路方面著手,解決這個問題的方案是假定敏感方向位移與驅動方向位移正交,用相關檢測的方法提取敏感信號。這也就是先假定無機械耦合的理想狀態,然后通過電路相移微調,零位直流補償緩解這一問題。
對于微陀螺,以乘法器、低通濾波等模擬電路為核心相關檢測器的任務是從大的背景干擾信號中高精度地分離出很小的科氏加速度敏感信息。通常背景干擾信號的幅度遠大于敏感信號量程。由于模擬電路的非絕對線性,干擾信號和敏感信號都存在諧波與正負半波非對稱等等問題,以乘法器、低通濾波為基礎的相關檢實際效果不佳,也不穩定。
本文準備從文獻中已經提出的機械耦合分析出發,提出一種敏感信號的讀取方法:在耦合干擾過零點采樣。
二、機械耦合分析
我們以線振動微機械陀螺模型進行分析。對于理想化的(無機械耦合)微機械陀螺,在單測量自由度時,理論分析有
驅動方向(x軸)位移 ![]() (1)
(1)
敏感方向(y軸)位移 ![]() (2)
(2)
其中 ωd 為驅動角速度;
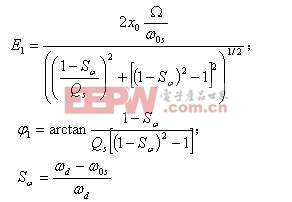 頻率敏感系數;
頻率敏感系數;
ω0s 為敏感方向固有振動角頻率






評論