基于自由擺的平板精確控制與激光追蹤系統

3 系統硬件方案
3.1 電源模塊
本系統電源電路采用LM2596與LM1117-3.3組合構成。LM2596開關電壓調節器是降壓型電源管理單片集成電路,能夠輸出3 A的驅動電流,同時具有很好的線性和負載調節特性;采用150 kHz的內部振蕩頻率,屬于第二代開關電源調節器,功率小、效率高;LM1117-3.3是低壓差線性電壓調節器,可以固定輸出3.3 V電壓,輸出電流可達800 mA。MSP430F5438單片機最小系統需要3.3V供電,因此采用LM1117-3.3給單片機供電。
3.2 數據采集模塊
本系統的數據采集模塊采用WDD35D-4精密電位器,精密電位器由一個電阻體和一個轉動(或滑動)系統組成。當電阻體的兩個固定觸點之間外加一個電壓時,通過轉動(或滑動)系統改變觸點在電阻體上的位置,在動觸點與固定觸點之間便可得到一個與動觸點位置成一定關系的電壓。利用MSP430F5438單片機內置A/D轉換器讀取精密電位器兩端電壓值,實現數據采集功能。
3.3 控制模塊
選擇MSP430F5438單片機進行系統控制。在系統運行過程中,單片機通過內置A/D轉換器讀取數據采集模塊采集的數據,然后進行數據處理,根據處理結果控制步進電機驅動芯片TB6560,最終控制步進電機按要求轉動。MSP430系列單片機是16位單片機,采用了精簡指令集(RISC)結構,具有豐富的尋址方式、大量的寄存器以及片內數據存儲器,可參加多種運算,同時具有高效的查表處理指令。MSP430F15438是基于閃存的產品系列,具有集成外設USB、模擬比較器、DMA、硬件乘法器、RTC、USCI、12位DAC等。
3.4 步進電機驅動模塊
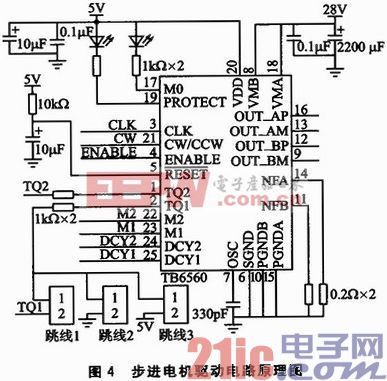
步進電機驅動模塊采用東芝公司的低功耗、高集成兩相混合式步進電機驅動芯片TB6560。其主要特點有:內部集成雙橋MOSFET驅動,最高耐壓40 V,單相輸出最大電流為3.5 A。步進電機驅動電路原理圖如圖4所示,引腳VMA、VMB是步進電機驅動電源引腳。OUT_AP、OUT AM、OUT BP、OUT_BM引腳分別與步進電機的兩相接口相連,當芯片輸入端接收到單片機輸入信號時,這4個引腳會執行單片機的命令使步進電機進行相應轉動。NFA、NFB分別為電機A、B相電路檢測端,所接電阻為0.2 Ω。PGNDA、PGNDB、SGND則是地線引腳。通過單片機MSP430F5438的I/O口與TB6560芯片的CLK、ENABLE、CW/CWW引腳相連,從而實現單片機對步進電機的控制。本文引用地址:http://www.104case.com/article/192953.htm




評論