基于自由擺的平板精確控制與激光追蹤系統(tǒng)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
2.2 激光追蹤理論
激光追蹤示意圖如圖3所示。在距離自由擺1.50 m距離處垂直放置靶子,當(dāng)擺桿垂直靜止且平板處于水平時(shí),調(diào)節(jié)靶子高度,使激光筆光斑照射在靶子的中心。用手推動(dòng)擺桿,支架與擺桿角度為θ(θ為30°~60°)。放開(kāi)擺桿,系統(tǒng)應(yīng)控制平板在15 s內(nèi)盡量使激光筆照射在中心線(xiàn)上(偏差絕對(duì)值1 cm),這就是激光追蹤理論的目標(biāo)。圖3中,b為自由擺擺桿靜止時(shí)平板中心(激光筆固定點(diǎn))到靶子中心的線(xiàn)段;a為θ的角平分線(xiàn)與線(xiàn)段b的交點(diǎn)到激光筆固定點(diǎn)的線(xiàn)段;c是激光筆固定點(diǎn)到靶子中心的線(xiàn)段;γ為線(xiàn)段a、c的夾角。本文引用地址:http://www.104case.com/article/192953.htm
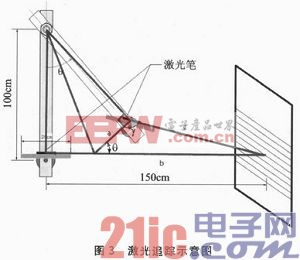
圖3中,擺桿與支架的角度θ可以通過(guò)轉(zhuǎn)軸上的精密電位器測(cè)量,轉(zhuǎn)換成的模擬電壓值輸出給單片機(jī),單片機(jī)通過(guò)內(nèi)置的A/D轉(zhuǎn)換器將模擬電壓值轉(zhuǎn)化成數(shù)字量,計(jì)算出相應(yīng)的角度θ。為了使系統(tǒng)實(shí)現(xiàn)激光追蹤功能,必須使激光筆發(fā)射的激光始終打在靶心位置。由于激光筆固定在平板下方,并且與平板方向平行,在擺桿擺動(dòng)過(guò)程中我們通過(guò)控制γ來(lái)實(shí)現(xiàn)追蹤功能。結(jié)合幾何運(yùn)算,對(duì)θ與γ之間的關(guān)系進(jìn)行分析:
a=tanθ/2
b=1.5-a
c2=a2+b2-2ab cosθ
sinθ/c=sinγ/b
角度γ即平板的傾角,由于平板固定在步進(jìn)電機(jī)轉(zhuǎn)軸上,因而角度γ也是步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的角度。通過(guò)以上分析,可以知道,實(shí)現(xiàn)系統(tǒng)激光追蹤的功能必須滿(mǎn)足θ與γ之間存在sin θ/c=sin γ/b這一關(guān)系。在整個(gè)系統(tǒng)運(yùn)行過(guò)程中,單片機(jī)不斷接收精密電位器采集的θ值,然后進(jìn)行
分析運(yùn)算,計(jì)算出步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)角度γ。由于MSP430F5438不含浮點(diǎn)數(shù)運(yùn)算單元,處理數(shù)據(jù)能力較弱,且會(huì)占用CPU大量的工作時(shí)間,所以在程序的編寫(xiě)過(guò)程中,采用查表法來(lái)優(yōu)化程序。以θ為已知量,γ為未知數(shù)運(yùn)用MATLAB求解,得到θ與γ的關(guān)系,如表1所列。在程序運(yùn)行過(guò)程中,當(dāng)單片機(jī)每讀到一個(gè)θ值,通過(guò)查表即可知道與之對(duì)應(yīng)的γ值。





評(píng)論