基于自由擺的平板精確控制與激光追蹤系統

摘要:以TI公司的MSP430F5438單片機為控制核心,結合步進電機和精密電位器WDD35D-4,實現了基于自由擺的平板控制與激光追蹤系統。當擺桿擺角為45°~60°時,平板可以承載8枚一元硬幣,并在5個擺動周期內維持穩定;當擺桿擺角為30°~60°時,固定在擺桿平板上的激光筆可以在15 s內找到并跟蹤1.5 m遠處的靶心。
關鍵詞:MSP430F5438;激光追蹤;精密電位器;自由擺
引言
隨著現代科學技術的發展,基于嵌入式系統的自動控制在工業中得到了廣泛的應用。目前,工業生產的機械復雜度越來越高,單純在靜止條件下的自動控制已經不能滿足人們對測控系統的要求,因此,研究如何在動態條件下對系統實施精確測量與控制是十分必要的。本文介紹了一種基于自由擺的平板精確控制與激光追蹤系統。在現代工業中,這種系統可以適應工業發展,應用在復雜度較高的自動化生產中,在生產過程中可以同時完成測量與控制,提高生產的自動化程度。
1 系統結構
1.1 系統整體結構
系統整體結構如圖1所示,主要由控制模塊、采集模塊、步進電機驅動模塊、步進電機、自由擺平板和激光筆,以及調試模塊組成。其中,采集模塊采用WDD35D-4精密電位器,當自由擺擺桿擺動時,電位器的阻值會發生變化,從而反應擺桿的位置信息。控制模塊采用低功耗單片機MSP430F5438作為處理器,MSP430F5438內置A/D模塊,可以采集精密電位器反饋的模擬信號。步進電機驅動選用東芝公司的TB6560芯片,該芯片是低功耗、高集成兩相混合式驅動芯片,驅動步進電機,用以控制自由擺平板和激光筆的位置。調試模塊用于控制模塊程序下載與系統調試,正常工作時不使用。

1.2 自由擺機械結構
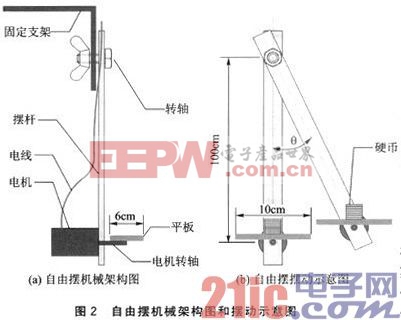
自由擺機械主要由固定支架、轉軸、擺桿、電機、平板、激光筆構成,如圖2(a)所示。自由擺轉軸上連接有精密電位器作為擺桿角度傳感器,電機固定在擺桿底部,平板固定在電機的轉軸上。自由擺擺動示意圖如圖2(b)所示,在平板上放置8枚一元硬幣,在擺桿擺動過程中,電機和平板也會隨擺桿轉動,通過單片機控制電機的轉動,使硬幣穩定在平板上。同時,在平板下方與平板平行的方向固定有激光筆,通過系統控制,可以實現在擺桿擺動過程中激光筆跟蹤預設目標的功能。
2 理論分析
2.1 自由擺精確控制理論
在平板中心穩定放置8枚1元硬幣(人民幣),抬起擺桿讓擺桿與支架成一定角度θ(45°≤θ≤60°),放開擺桿讓其自由擺動。自由擺精確控制必須達到以下目標:在擺桿擺動過程中,要求控制平板狀態,使硬幣在5個擺動周期中不會從平板上滑落,并盡量減少滑離平板的中心位置。
要達到以上目的,電機必須根據相關參數控制平板的角度,保證擺桿擺動過程中硬幣的受力平衡。分析自由擺擺動過程,精確控制主要得保證從擺桿初始位置到平板與擺桿垂直(該狀態無須主動控制硬幣即可受力平衡)的過程中,硬幣保持相對穩定。




評論