自適應動態尋優控制系統仿真研究

 本文引用地址:http://www.104case.com/article/192079.htm
本文引用地址:http://www.104case.com/article/192079.htm程序框圖說明:初始化的主要任務是設置變量初值,輸入各種參數;N階慣性環節用四階龍格庫塔法實現;根據自適應動態尋優算法的要求,把每一步進周期分成2N等份,采樣周期△t=T0/2N,L=2N+1計算AZ2N+1,并判斷步進增量方向,為下次送步進階躍做好準備。L=2N時根據上次△Z2N+1以及△x(n一1)的符號送第n步的步進階躍。
3 仿真結果
在實際工業生產過程中,由于要準確地辨識控制對象的參數極其困難,因此采用自適應動態尋優方法就不需要辨識控制對象的參數,而且還能自動地適應參數的飄移。只要知道控制對象線性部分的階數就能正確地進行動態尋優。同時,受擾動的影響極值特性會緩慢的飄移,最優工作點也會隨之飄移,因此控制系統的任務就是在動態過程中不斷地搜尋最優工作點。所以仿真的目的就在于檢驗控制系統能否很好地完成上述工作任務。
(1)對一具有二階慣性環節的極值調節控制對象進行動態尋優,其線性部分的傳遞函數為:
G(s)=1/[(T1S+1)(T2S+1)],T1=100s,T2=40 s,極值調節器參數為:步長△X=2,步進周期T0=40 s,采樣周期△t=10 s,在動態尋優的過程中突然把慣性環節的時間常數T1=100 s,T2=40 s,改變為T1=50 s,T2=20 s,圖5顯示了整個動態尋優過程,從圖中可以看出:控制對象時間常數的改變對動態尋優的正確性沒有任何影響。
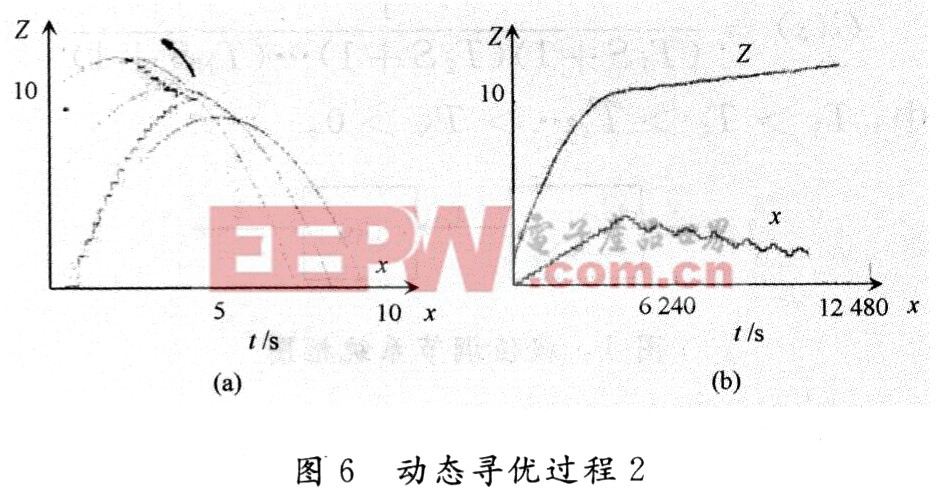
(2)控制對象的參數以及調節器的參數與(1)相同,對極值調節器跟蹤極值特性飄移的能力進行了仿真研究,圖6顯示了整個動態尋優過程,從圖中可以看出:采用自適應動態尋優方法的極值調節器能夠很好地跟蹤極值特性的飄移。
4 結 語
仿真結果表明,采用自適應動態尋優方法的極值調節控制系統成功地解決了極值調節控制系統運行的連續性與穩定性問題,這也是傳統的動態尋優方法多年來無法克服也無法回避的難題,而且這種動態尋優方法對控制對象的先驗知識要求非常少,只需要知道其線性部分的階數就足夠了。因此采用自適應動態尋優方法的極值調節控制系統將會在實際工業生產過程中發揮強大的控制功能。









評論